Simple Line Follower Robot © CC BY-NC-SA
Simple line following robot using IR proximity sensors, Arduino UNO and motorsheild.
Hey, Today I’m going to share information about a simple robot made using Arduino UNO, motorshield and some basic components.This project is easy to make and helps in learning about basic robotics and programming.hope you like it and learn something from it.
What Is an Autonomous Robot?
An autonomous robot is simply a machine which is programmed once and then performs tasks on its own.Basic examples of autonomous robots are, 1. Obstacle Avoidance.2. Line Follower.
In this Instructable we are going to learn about a simple Line Following Robot which uses Infrared sensors to detect Black line on White surface.
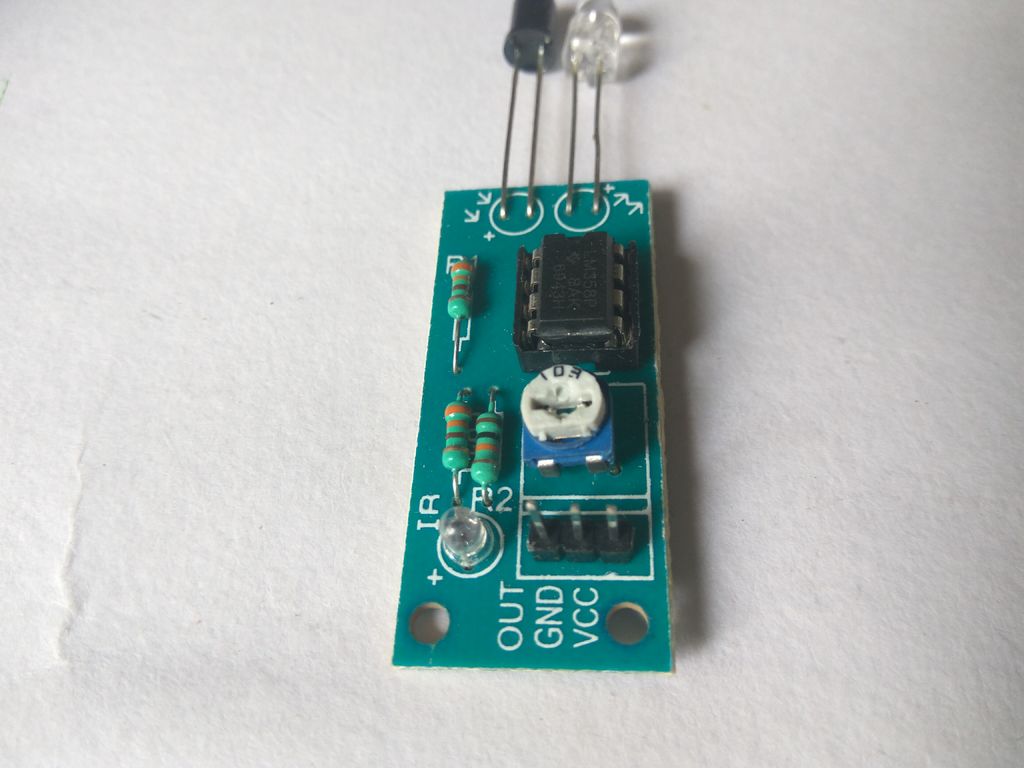
These sensors can be bought online for cheap or you can make them yourself which is even better as it is fun and educational.
I have posted a tutorial about how to make these sensors, you can check it out : IR Proximity Sensor
Now as you know what the project is, We can move ahead to start building.
Building the Chassis:-
First you need to cut the wood into two pieces. 1st one is about 12cm x 10cm. 2nd one is about 10cm x 7cm.
The larger piece is the base where motors will be attached and batteries will be kept.
The smaller piece will be used to mount the Arduino and will be placed on top.
Once you have the two pieces according to the measurements, first drill holes in the larger board to attach the angle brackets for motors. Refer to the picture.
Next connect the motors to the brackets and screw them in place.
Now attach the wheels to them and secure them using some screws.

Now flip the board upside down and stick the caster wheel, you can drill a hole and connect it using screw but then the screw makes a bump in the front which doesn’t look very good.
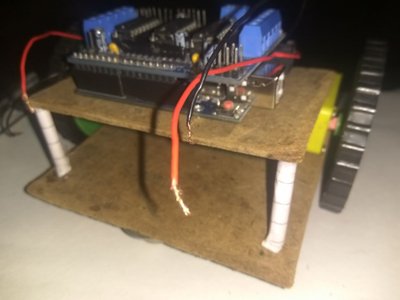
with this the lower base is done and now we make the upper base to mount the Arduino. For this first place the Arduino on the board and mark the screw holes with a marker. and drill through them. Now screw down the Arduino in place.

Now we have to connect the motorshild to the Arduino but before that we have to solder some pins to the shield. If you look at the bottom right corner you will see some holes which are the Analog pins next to them is the ground rail and next to it is the +5v rail, solder header pins to all this holes as we will need to connect sensors.
After the soldering is done, we can connect the motorshild on top of Arduino.

Next we will take some double sided tape and stick it to the bottom of this board and place it on top of the motors, to prevent it from falling we can add some spacers in front as I have shown In the Picture. Here I have used paper to make spacers as I couldn’t find normal ones. I rolled paper and used superglue to make it solid hard.
If you are too lazy to build a chassis you can buy one online ( 2WD Robot platform ) but whats the fun in that??
With this The basic body structure is done and we can move on to the Next part.
Building Power Supply Unit :-
Now once the base is done, we can move on to start making the power unit. To power our robot we will be using two 9v batteries and use a DBDT switch to turn the circuit on. Follow the diagram and attach male header pins to one side of the wires or you can leave it as it is. These wires are going to power the motorshield. Solder a DC power jack to the other two terminals for the Arduino.

NOTE:- As here we are using two separate batteries to power the Arduino and Motorshield, we will have to remove the jumper from the Motorshield which is next to the power terminal of the Shield on right side.(Refer the image above)
If you don’t do it there is chance that you may damage the Microcontroller. Refer to the image above to find out the jumper.
Okay so once we have a power supply unit ready we have to connect the pins to the motorshield and Jack to the Arduino. (Make sure that you don’t plug in the batteries right now, Cause nothing will work anyway.) connect the red (+ve terminal) to the left side of power terminals of motorshield and the Black(-ve terminal) to the right side.
Now find a place around the robot to place the switch, I have placed it behind, near the motors. Just keep it where it is easily accessible.
Now we will add sensors to our robot, so it can scan the for the black lines. These Infrared sensors I’ve used have 3 Pins,
1. VCC which is the +be terminal and should be connect to the +5v.
2. GND which is the -ve terminal and must be connected to the ground.
3. Signal pin. which is connected to any Analog pin on Arduino.
here we are using 2 sensors so we will need 2 Analog pins, A4, A5.
Just connect the pins to the Motorshield and place the sensors in front, one left, one right.
Use a small cardboard piece to mount sensors on.
Connect the sensor’s VCC pin to +5v and GND to GND pin on motor shield.
Connect the Out pin of right sensor to A4 and left sensor to A5.
With this the Robot is ready, it just needs a program to run and perform its task of avoiding obstacles.

Programming and Testing :-
To program the robot first connect the USB cable of arduino to the port as shown in the picture.

For those who are new to arduino you first have to download the Arduino IDE. then you can upload the code.
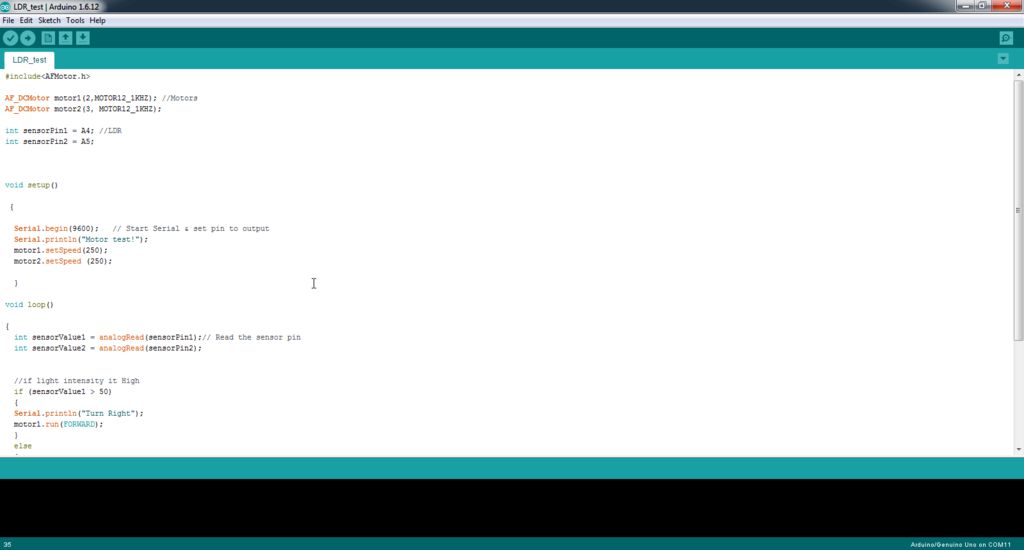
Once the code is uploaded the robot is ready to start the action you can now connect the 9v batteries and test.
For the track use an electric tape that is black and stick it in a circle on a White surface. Now place the robot on the line and switch it On. the bot should start to follow the line if it does not follow the line then you may have to adjust the pot on the module just slowly turn it one side until it turns on then turn it the other side until it is off now it now it should turn on when on white and off when on black this means the robot is ready to go.
Опыт создания первого робота на Ардуино (робот-«охотник»)
В данной статье я хочу описать процесс сборки своего первого робота на ардуино. Материал будет полезен другим таким же новичкам, как и я, которые захотят изготовить какую-нибудь «самобеглую тележку». Статья представляет собой описание этапов работы с моими дополнениями по различным нюансам. Ссылка на итоговый код (скорее всего, не самый идеальный) дана в конце статьи.

По мере возможности я привлекал к участию своего сына (8 лет). Что именно с ним получалось, а что нет — на это я выделил часть статьи, возможно, кому-то пригодится.
Общее описание робота
Вначале несколько слов о самом роботе (идея). Собирать что-то типовое на старте не очень хотелось. В то же время, набор компонентов был довольно стандартным — шасси, двигатели, ультразвуковой датчик, датчик линии, светодиоды, пищалка. Вначале из этого «супового набора» был придуман робот, который охраняет свою территорию. Он едет на нарушителя, который пересек линию круга, а потом возвращается в центр. Однако в этом варианте была нужна прочерченная линия, плюс лишняя математика, чтобы постоянно оставаться в круге.
Поэтому после некоторых обдумываний я несколько изменил идею и решил делать робота-«охотника». На старте он поворачивается вокруг своей оси, выбирая поблизости цель (человека). Если «жертва» обнаружена, «охотник» включает мигалку и сирену, и начинает ехать на нее. Когда человек отходит/отбегает, робот выбирает новую цель и преследует ее, и так далее. Такому роботу не нужен ограниченный круг, и он может работать на открытой территории.
Как видите, это во многом напоминает игру «догонялки». Хотя в итоге робот и не получился достаточно резвым, но он честно взаимодействует с окружающими его людьми. Особенно это нравится детям (иногда, правда, кажется, что они вот-вот растопчут его, аж сердце ёкает. ). Думаю, для популяризации технического конструирования это хорошее решение.
Структура робота
Итак, мы определились с идеей, перейдем к компоновке. Список элементов формируется из того, что должен уметь робот. Тут всё вполне очевидно, поэтому сразу посмотрим на нумерацию:

«Мозги» робота — плата arduino uno (1); была в заказанном из Китая наборе. Для наших целей ее вполне хватает (ориентируемся на количество используемых пинов). Из этого же набора мы взяли готовое шасси (2), на которое крепятся два ведущих колеса (3) и одно заднее (свободно вращающееся) (4). Также в наборе был готовый батарейный отсек (5). Спереди у робота стоит ультразвуковой датчик (HC-SR04) (6), сзади — драйвер двигателей (L298N) (7), по центру — светодиод-мигалка (8), и чуть в стороне — пищалка (9).
На этапе компоновки мы смотрим:
— чтобы все влезло
— чтобы было сбалансировано
— чтобы было рационально размещено
Частично это уже сделали за нас китайские коллеги. Так, тяжелый батарейный отсек поставлен в центр, и примерно под ним стоят ведущие колеса. Все остальные платы легкие, их можно размещать по периферии.
- В шасси из набора есть много заводских отверстий, но какая в них логика — я так и не разобрался. Двигатели и аккумуляторный блок закрепились без проблем, дальше началась «подгонка» со сверлением новых отверстий, чтобы закрепить ту или иную плату.
- Весьма выручили латунные стойки и прочий крепеж из запасников (иногда приходилось выкручиваться).
- Шины от каждой платы пропускал через зажимы (опять же нашел в запасниках). Весьма удобно, все провода лежат красиво и не болтаются.
Отдельные блоки
Теперь пройдусь по блокам и расскажу персонально про каждый.
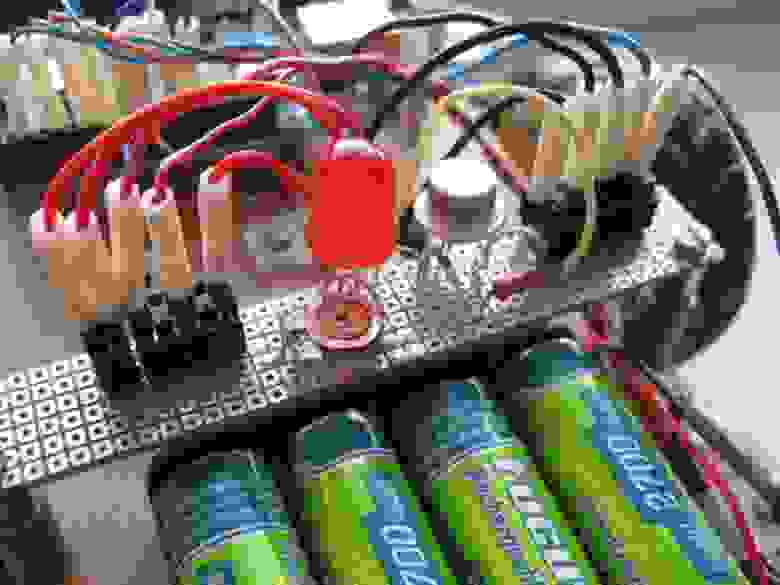
Понятно, что робот должен иметь хороший источник энергии. Варианты могут быть разные, я выбрал вариант с 4 аккумуляторами АА. В сумме они дают примерно 5 В, и такое напряжение можно прямо подать на пин 5V платы arduino (минуя стабилизатор).
Некоторая настороженность, конечно, у меня была, но это решение вполне работоспособно.
Так как питание нужно везде, то для удобства я сделал по центру робота два разъема: один «раздает» землю (справа), а второй — 5 В (слева).
Двигатели и драйвер
Сначала про крепление двигателей. Крепление заводское, но сделано с большими допусками. Другими словами, двигатели могут «вихлять» на пару миллиметров влево-вправо. Для нашей задачи это не критично, а вот где-то может и влиять (робота начнет уводить в сторону). На всякий случай я выставил двигатели строго параллельно и зафиксировал клеем.

Для управления двигателями, как я писал выше, используется драйвер L298N. По документации у него три пина на каждый двигатель: один для изменения скорости и пара пинов для направления вращения. Тут есть один важный момент. Оказывается, если напряжение питания 5 В, то регулировка скорости просто не работает! То есть либо совсем не крутит, либо крутит по максимуму. Вот такая особенность, из-за которой я «убил» пару вечеров. В конце концов, нашел упоминание где-то на одном из форумов.
Вообще говоря, низкая скорость вращения мне требовалась при развороте робота — чтобы он имел запас времени просканировать пространство. Но, так как с такой задумкой ничего не вышло, пришлось делать по другому: небольшой поворот — остановка — поворот — остановка и т. д. Опять же, не столь изящно, но работоспособно.
Еще здесь добавлю, что после каждого преследования робот выбирает случайное направление нового поворота (по или против часовой стрелки).

Еще одна железяка, где пришлось искать компромиссное решение. Ультразвуковой датчик на реальных препятствиях дает нестабильные цифры. Собственно, это было ожидаемо. Идеально он работает где-нибудь на соревнованиях, где есть гладкие, ровные и перпендикулярные поверхности, а вот если перед ним «мелькают» чьи-то ноги — тут нужно вводить дополнительную обработку.
В качестве такой обработки я поставил медианный фильтр на три отсчета. Исходя из тестов на реальных детях (во время тестов ни один ребенок не пострадал!), его оказалось вполне достаточно для нормализации данных. Физика здесь простая: у нас есть сигналы, отраженные от нужных объектов (дающие требуемое расстояние) и отраженные от более далеких, например, стен. Вторые представляют собой случайные выбросы в измерениях вида 45, 46, 230, 46, 46, 45, 45, 310, 46… Именно их медианный фильтр и отсекает.
После всей обработки у нас получается расстояние до ближайшего объекта. Если оно меньше некоторой пороговой величины — тогда мы включаем сигнализацию и едем прямо на «нарушителя».
Мигалка и сирена
Пожалуй, самые простые элементы из всего перечисленного. Их видно на фотографиях выше. По железу здесь писать нечего, поэтому теперь перейдем к коду.
Программа управления
Расписывать детально код я смысла не вижу, кому нужно — ссылка в конце статьи, там всё достаточно читабельно. А вот общую структуру было бы неплохо объяснить.
Первое, что пришлось осмыслить: робот — это устройство реального времени. Точнее, вспомнить, потому что и раньше, и сейчас все равно занимаюсь электроникой. Значит, сразу забываем про вызов delay(), который очень любят использовать в скетчах-примерах, и который просто «замораживает» программу на указанный промежуток времени. Вместо этого, как советуют опытные люди, вводим таймеры на каждый блок. Прошел требуемый промежуток — выполнили действие (увеличили яркость светодиода, включили двигатель и так далее).
Таймеры могут быть взаимосвязаны. Так, например, пищалка работает синхронно с мигалкой. Это чуть упрощает программу.
Естественно, всё разбиваем на отдельные функции (мигалка, звук, поворот, движение вперед и так далее). Если так не делать, то потом уже не разобраться, что откуда и куда.
Нюансы педагогики
Все, что было описано выше, я делал в свободное время по вечерам. В неспешном режиме я потратил на робота где-то недели три. На этом можно было бы и завершиться, но я еще обещал вам рассказать о работе с ребенком. Что выполнимо в таком возрасте?
Работа по инструкции
Каждую деталь мы сначала проверяли отдельно — светодиоды, пищалка, моторы, датчики и т. д. Есть большое количество готовых примеров — какие-то прямо в среде разработки, другие можно найти в интернете. Это, несомненно, радует. Берем код, подключаем деталь, убеждаемся, что работает, далее уже начинаем изменять под свою задачу. Подключения по схеме и под некоторым моим контролем ребенок делает сам. Это хорошо. Работать четко по инструкции тоже надо уметь.
Порядок работы («от частного к общему»)
Вот это сложный пункт. Нужно приучать, что большой проект («сделать робота») состоит из мелких задач («подключить датчик», «подключить моторы». ), а те, в свою очередь, из еще более мелких шагов («найти программу», «подключить плату», «загрузить прошивку». ). Выполняя более-менее понятные задачи нижнего уровня, мы «закрываем» задачи среднего уровня, а из них уже складывается общий результат. Объяснял, но, думаю, осознание придет еще не скоро. Где-то, наверное, к подростковому возрасту.
Сверление, резьбы, винты, гайки, пайка и запах канифоли — куда же без этого. Ребенок получил базовый скилл «Работа с паяльником» — удалось спаять несколько соединений (я чуть-чуть помогал, не скрою). Не забывайте про объяснение техники безопасности.
Работа на компьютере
Программу для робота писал я, но каких-то попутных результатов все-таки удалось достичь.
Первое: английский. В школе его только-только начали, поэтому мы «со скрипом» разбирали, что такое pishalka, migalka, yarkost и прочий транслит. Поняли хотя бы это. Я осознанно не стал использовать родные английские слова, так как до этого уровня мы еще не дошли.
Второе: эффективная работа. Учили горячие комбинации клавиш, как быстро выполнять типовые операции. Периодически, когда писали программу, мы менялись с сыном местами, и я говорил, что нужно сделать (замену, поиск и т.д.). Приходилось повторять снова и снова: «выдели двойным кликом», «зажми Shift», «зажми Ctrl» и так далее. Процесс обучения здесь не быстрый, но, я думаю, навыки постепенно отложатся «в подкорку».
Третье: слепая печать. Комментарии в коде я доверил печатать ребенку (пусть тренируется). Сразу поставили правильно руки, чтобы пальцы постепенно запоминали расположение клавиш.
Как видите, у нас все еще только-только начинается. Навыки и знания будем оттачивать и дальше, в жизни пригодятся.
Кстати, про перспективу…
Дальнейшее развитие
Робот сделан, ездит, мигает и пищит. Что же теперь? Воодушевившись достигнутым, мы планируем дорабатывать его дальше. Есть задумка сделать дистанционное управление — по типу лунохода. Было бы интересно, сидя за условным пультом, контролировать движение робота, который ездит совсем в другом месте. Но это уже будет отдельная история…
И в конце, собственно, герои этой статьи (видео по клику):