MAMBA F405 MK2 и MAMBA F405 mini MK2: обзор на полетные контроллеры
На данный момент есть 2 версии этого совмещенного полетного контроллера с регуляторами оборотов — MAMBA F405 MK2 и MAMBA F405 mini. Отличаются они размерами и амперами у регуляторов оборотов. Так, у MAMBA F405 MK2 регуляторы оборотов 4 в 1 на 40А и монтажные отверстия 30,5 * 30,5 мм, а у MAMBA F405 mini на 20А и монтажные отверстия 20 * 20 мм . Применяются соответственно на стандартных квадрокоптерах 220 мм и на мини до 200 мм.
Общее о MAMBA F405 MK2 и MAMBA F405 mini MK2
F405 MK2 создан для гоночных квадрокоптеров на раме 220-240 мм и для работы с аккумуляторами LiPo 3-6S.
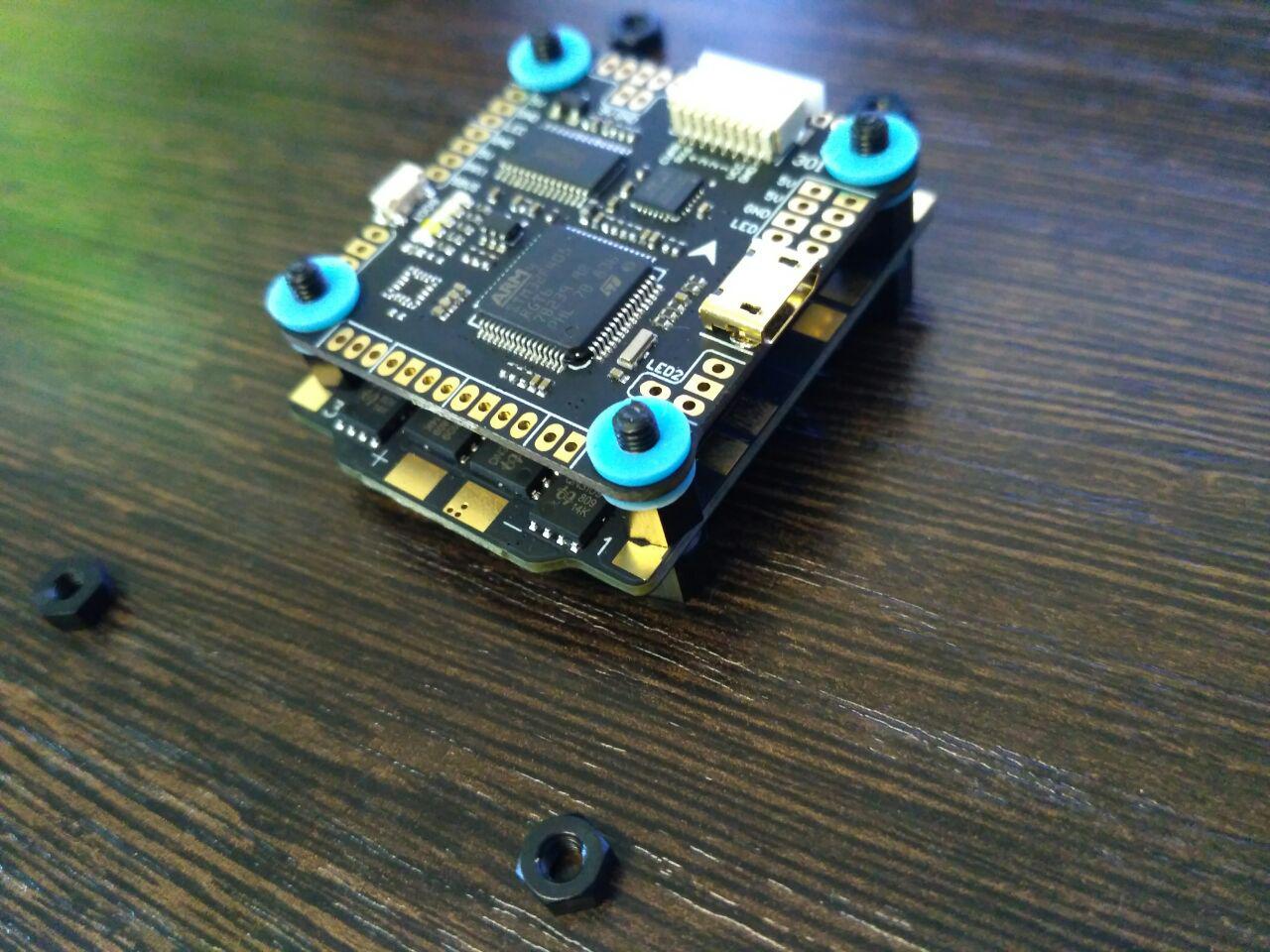
Комплект состоит из 2 плат с размером монтажных отверстий 30,5 * 30,5 мм, который называется «стак» и состоит из полетного контроллера и регулятора оборотов 4 в 1. Все чаще пилоты выбирают именно такую компоновку из-за простоты монтажа и экономии места, а также для максимальной защиты регуляторов оборотов от повреждений при крашах.
 MAMBA F405 MK2
MAMBA F405 MK2
Регуляторы оборотов MAMBA F405 MK2 рассчитаны на 40 ампер, а значит, можно использовать аккумуляторы 6S совместно с мощными моторами, например, iFlight 2207 с рейтингом 2750KV (Aliexpress | Banggood) или чуть меньше. или с моторами от Racestar с примерно таким же рейтингом и маркировкой.
MAMBA F405 mini MK2 это уменьшенная версия как по размерам, так и по амперам регуляторов оборотов, здесь вместо 40А – 20А. Также отличается BEС – у большой версии он 5 V/1.5A, а у маленькой – 5V/1A.
 MAMBA F405 mini MK2
MAMBA F405 mini MK2
Мини версия рассчитана на аккумуляторы LiPo 3-4S и подходит для рам 220 мм и меньше.
Технические характеристики MAMBA F405 MK2
Полетный контроллер
- Входное напряжение: 12,6-25 V (3-6 S);
- BEC: 5 V 1.5A;
- MCU: STM32F405;
- Гироскоп: MPU6000;
- Флэш-память: 16 MB;
- OSD: AT7456;
- Монтажные отверстия: 30,5*30,5 мм;
- Вес: 6 г.
Регуляторы оборотов (ESC)
25 V);
Технические характеристики MAMBA F405 mini MK2
Полетный контроллер
14,8 V (3-4S);

Регуляторы оборотов (ESC)
14,8 V (3-4S);

Что в комплекте
- Полетный контроллер Mamba F405;
- Регулятор оборотов Mamba F405;
- Конденсатор;
- Антивибрационные резиновые кольца;
- Силовые провода;
- Разъем XT60;
- Запасной многопиновый кабель.
Монтаж MAMBA F405
Регулятор оборотов 4 в 1 крепится на пластиковые винты к раме квадрокоптера, затем устанавливаются резиновые антивибрационные подушки (кольца) с двух сторон платы и устанавливается плата полетного контроллера, ее нужно затягивать винтами не сильно туго.
Кстати, в комплекте с полетным контроллером идет еще одна печатная плата с нанесенной на нее распиновкой, чтобы вам было проще монтировать периферию. Эту плату можно использовать в качестве защитной крышки, тоже подсоединив ее сверху.

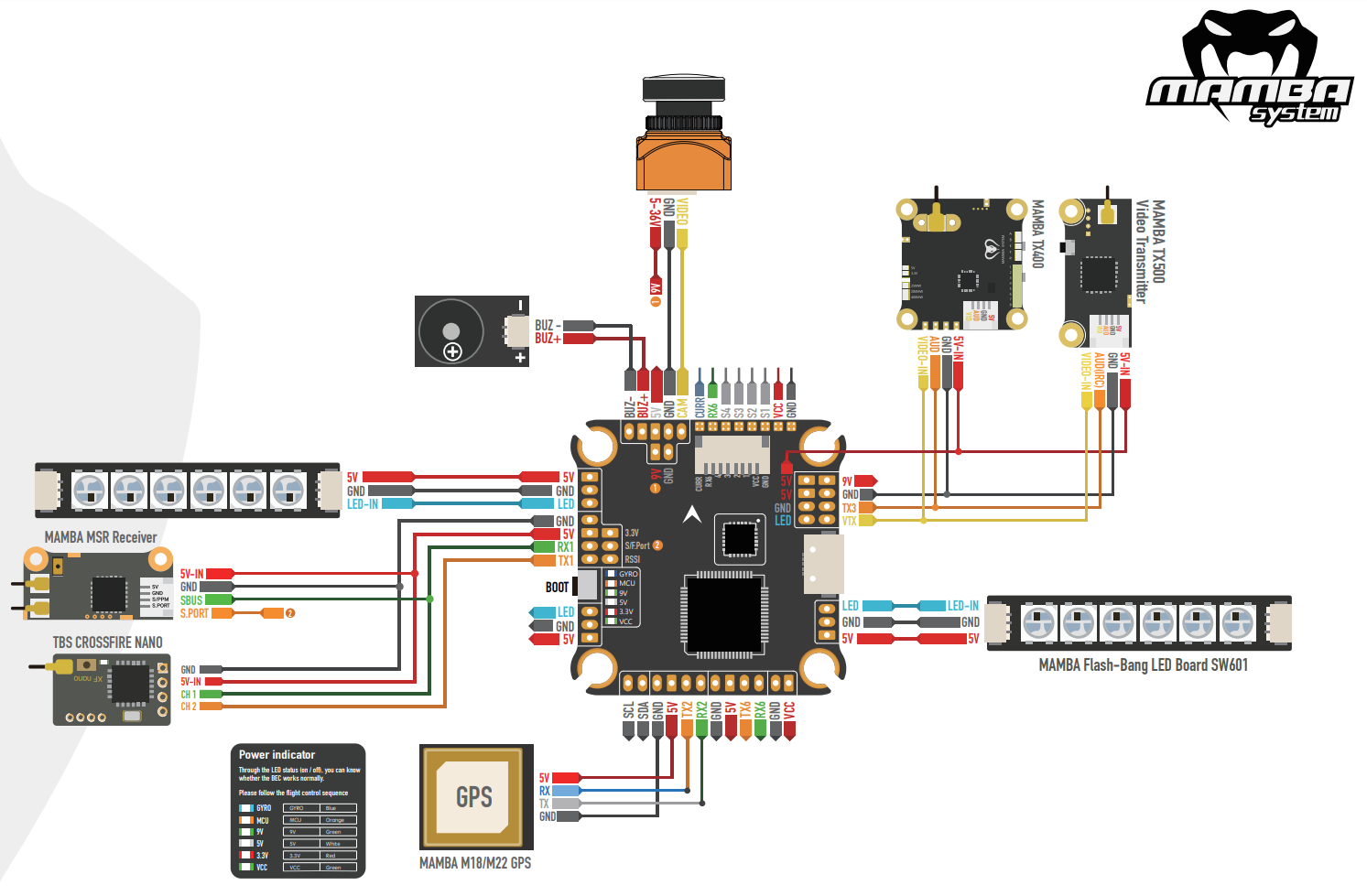
Далее, все компоненты подключаются либо к UART-портам, либо припаиваются к соответствующим контактам на основе схемы (как раз та самая плата-защита с маркировкой контактов). Если у вас будут вопросы при монтаже компонентов, пишите в комментариях, поможем!
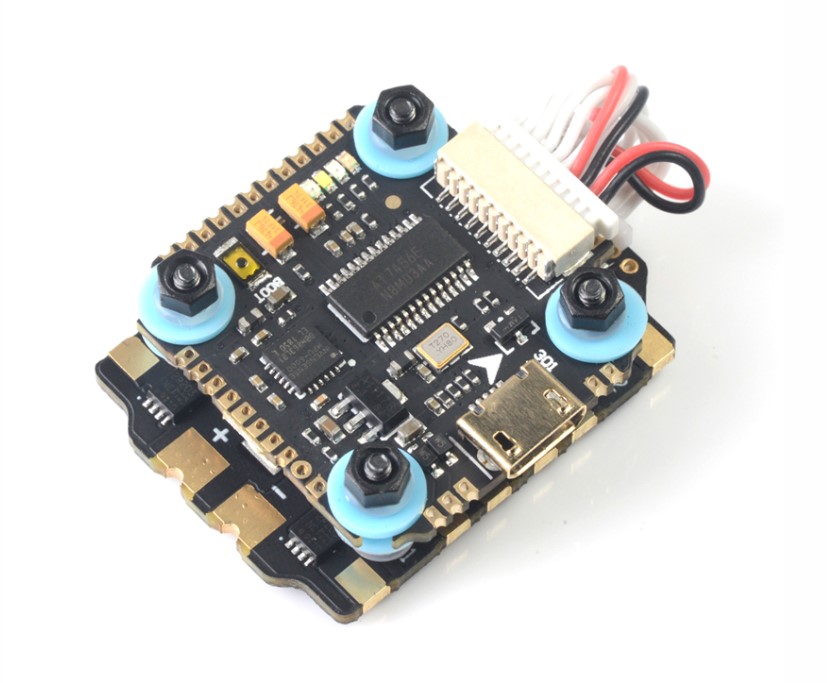
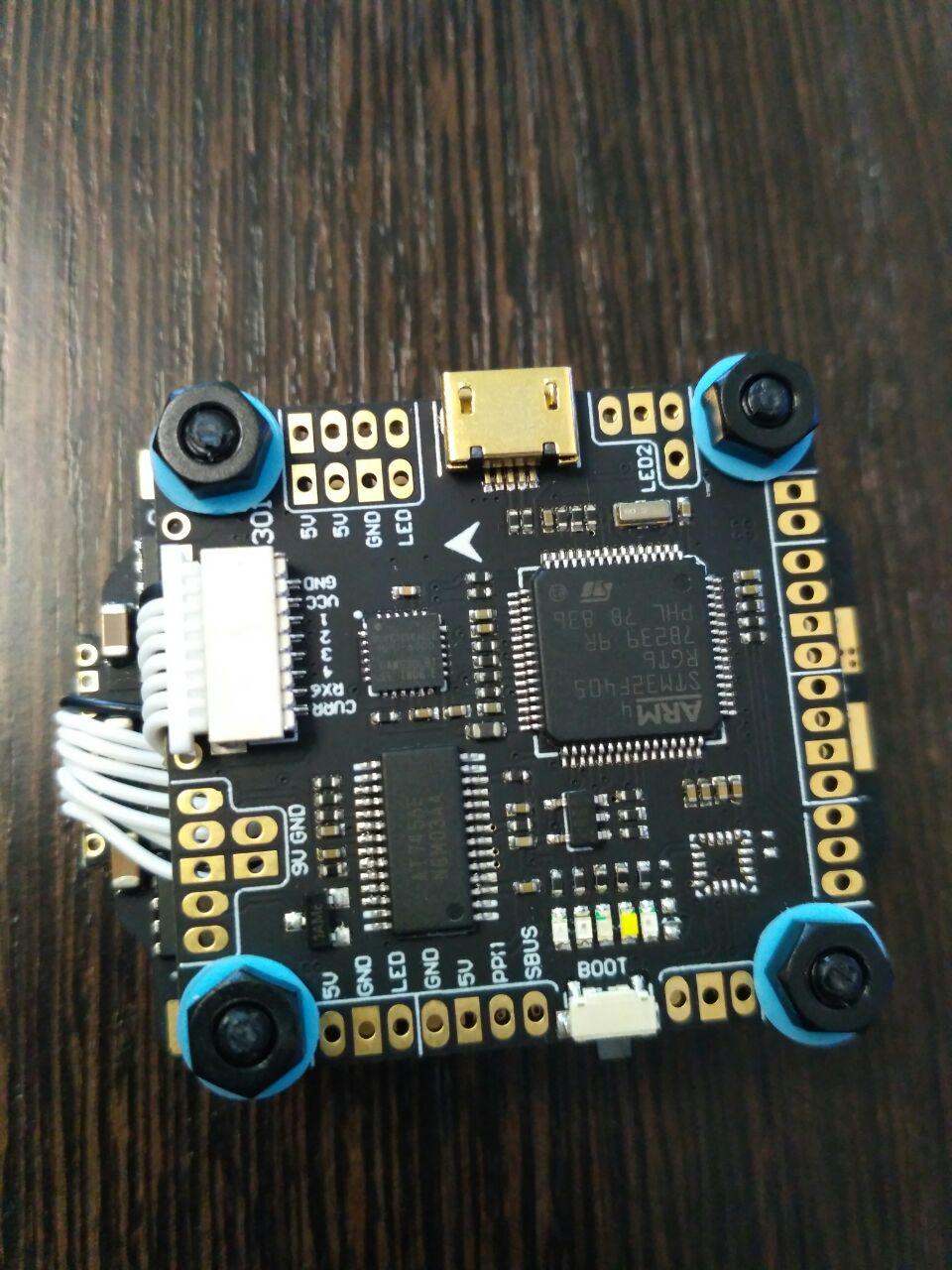
Внешний вид полетного контроллера Mamba F405 и MAMBA F405 mini
У полетного контроллера установлен современный гироскоп MPU6000, который известен тем, что генерирует мало шума, но так как в последней версии прошивки BetaFlight убрали частоту обновления в 32kHz, то этот момент особой роли не играет.
На плате полетного контроллера инженеры разместили аж 6 UART портов с питанием 5V, а свободно использовать вы сможете 4 из них, так как один порт предназначен для получения телеметрии с регуляторов оборотов, а второй для протокола SBUS.
Если обычные регуляторы оборотов нужно было бы припаивать проводами к полетному контроллеру, то ESC 4 в 1 из этого стака достаточно просто подсоединить к белому пину:

У F405 нет слота для SD-карты, но тем не менее, вы можете использовать журнал Blackbox. Эта функция доступна благодаря наличию небольшого чипа флэш-памяти на 16 мб.
На плате есть также 2 танталовых кондесатора (желтые на фото ниже) которые выполняют функцию фильтра тока, который подается на гироскоп и OSD, поэтому у вас будут максимально чистые сигналы с этих чипов (то есть, будет очень мало помех в управлении и видео).
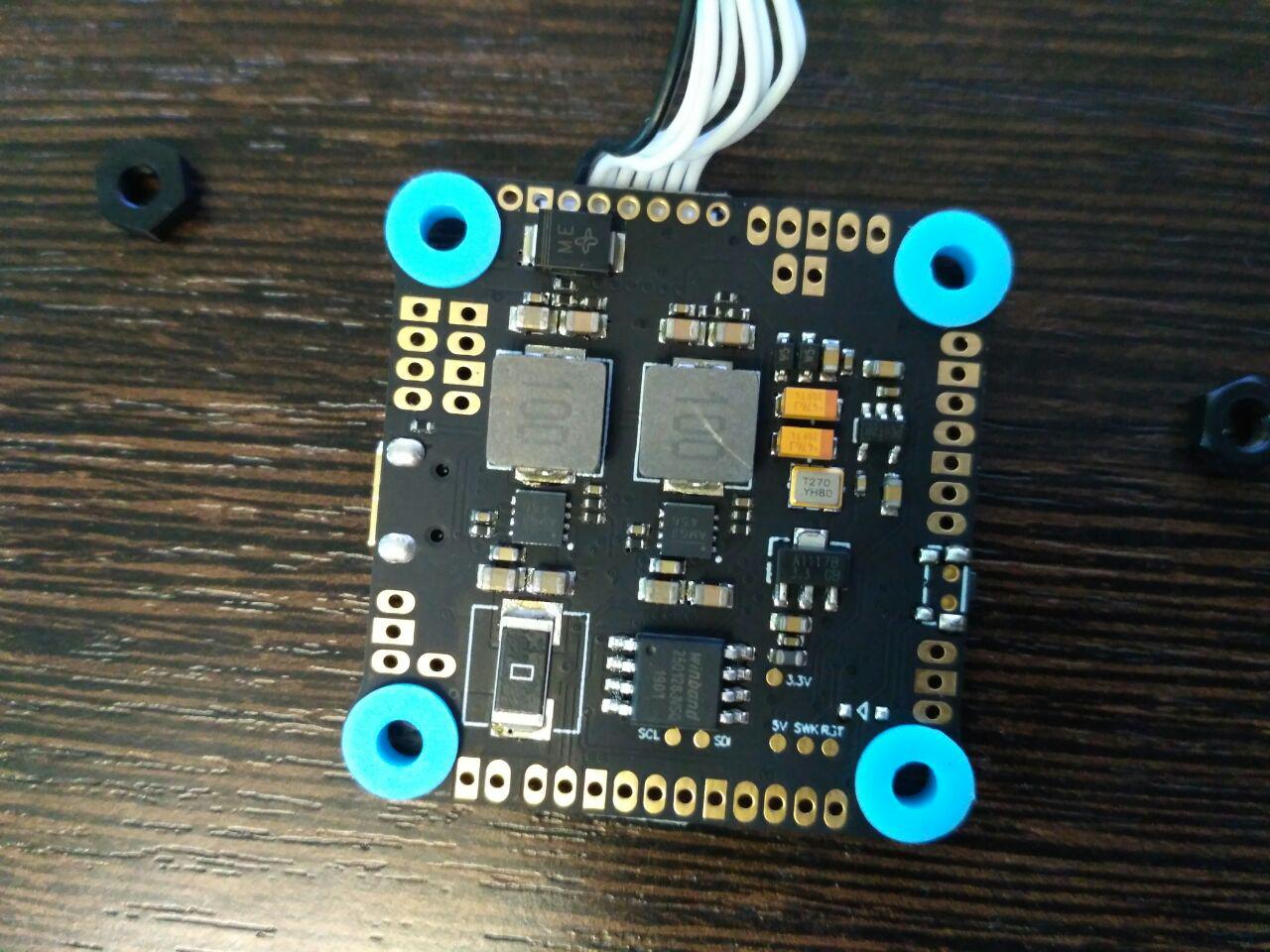
Если вы купили мощный видеопередатчик, который нужно подключать напрямую к аккумулятору, то на плате полетного контроллера инженеры разместили VCC-пин, который никак не регулирует напряжение, а значит, видеопередатчик может быть запитан без кустарных сборок из проводов от аккумулятора.
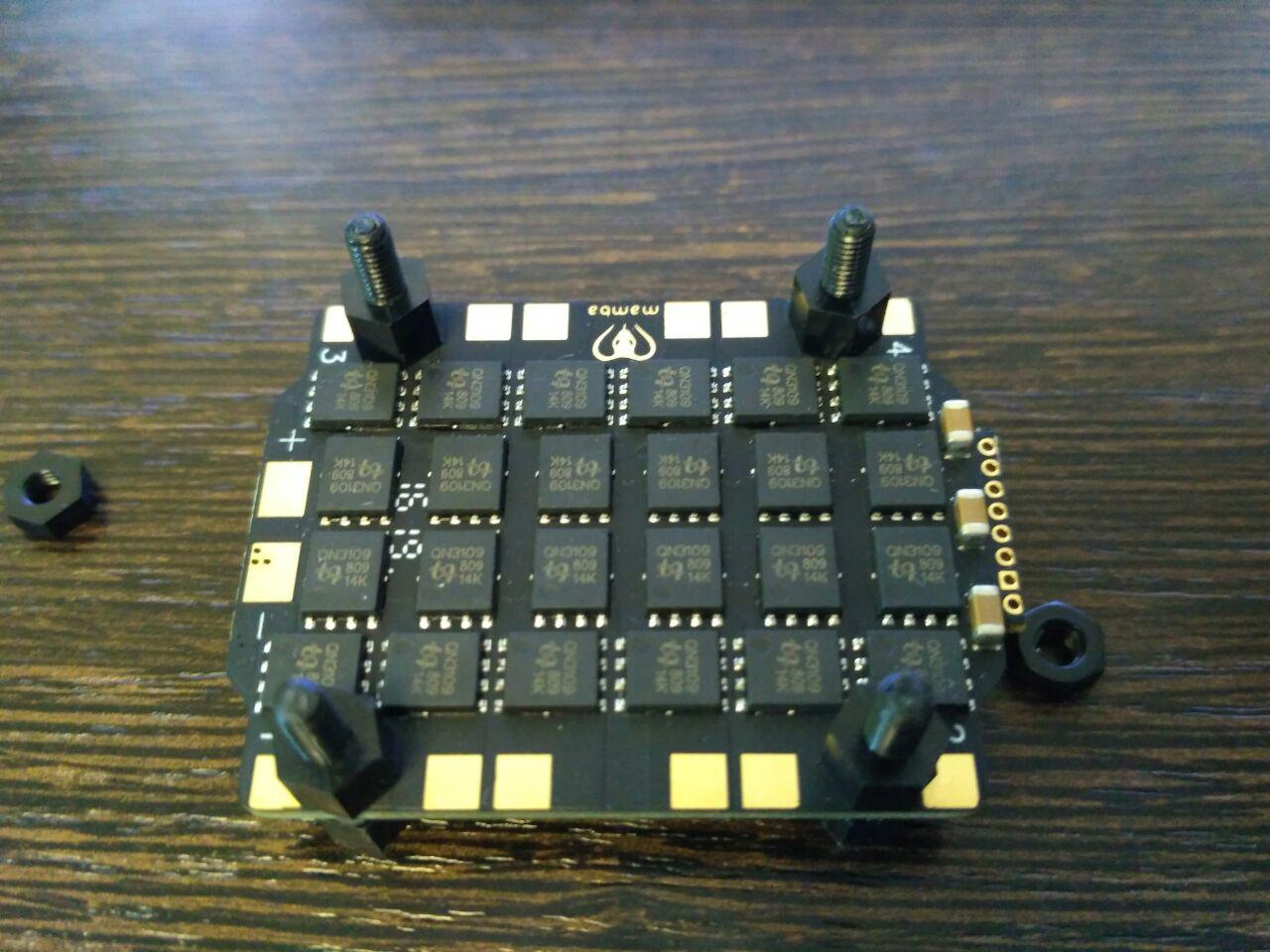
Внешний вид регуляторов оборотов 4 в 1 Mamba F405
Сборка очень компактная, но тем не менее все пропаяно очень качественно. С одной стороны плата обработана лаковым покрытием для защиты от влаги.
В комплекте идет конденсатор, который нужно припаять к контактам питания около разъема XT60. Сделать это нужно обязательно, так как на плате встроенных конденсаторов мало и требуется дополнительная поддержка.

Обратите внимание на разъем подключения и контакты рядом с ним – это сделано для того, чтобы в случае поломки разъема вы смогли припаяться к контактам и все будет работать, как и прежде. Кроме того, если у вас вышел из строя полетный контроллер или просто вы хотите применить ESC в другой компоновке, вы можете подключить этот регулятор оборотов к любому другому полетному контроллеру. В комплекте идет схема подключения (распиновка), поэтому, подключение не составит труда.

Рекомендуется полностью обработать регуляторы оборотов диэлектрическим лаком, чтобы исключить короткое замыкание из-за попадания влаги или мокрой травы. Такой лак продается в любом радиоэлектронном магазине. Также можно обработать основные части и полетного контроллера.
Mamba Basic F405 Flight Controllers¶
The Mamba Basic line of flight controllers are produced by [Diatone](https://www.diatone.us).
Features¶
Where to Buy¶
Pinout¶
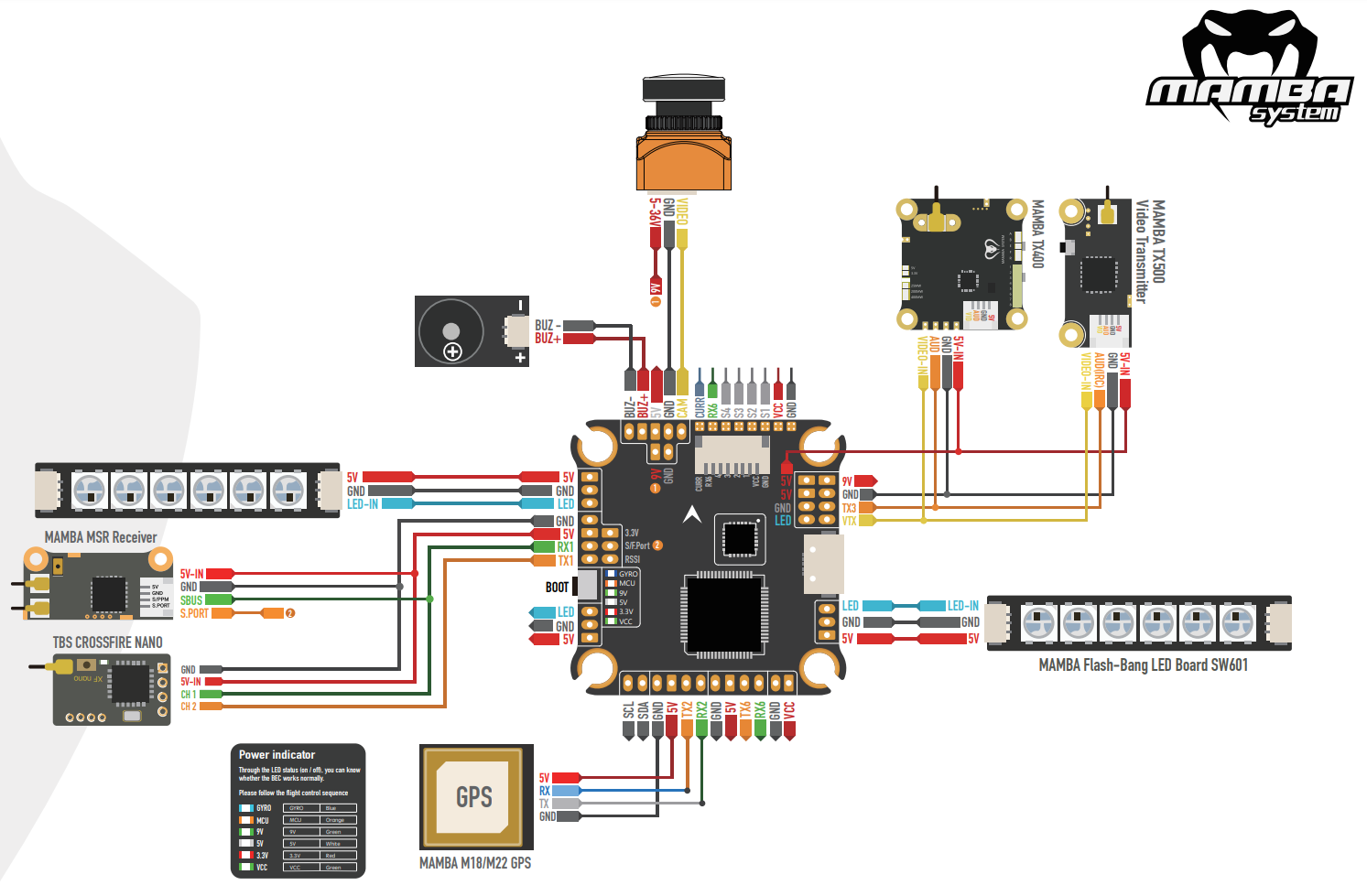
UART Mapping¶
The UARTs are marked Rn and Tn in the above pinouts. The Rn pin is the receive pin for UARTn. The Tn pin is the transmit pin for UARTn.
RC Input¶
The PPM pin, which by default is mapped to a timer input, can be used for all ArduPilot supported receiver protocols, except CRSF/ELRS and SRXL2 which require a true UART connection. However, FPort, when connected in this manner, will only provide RC without telemetry.
To allow CRSF and embedded telemetry available in Fport, CRSF, and SRXL2 receivers, the SBUS pin can also be configured to be used as true UART1 RX pin for use with bi-directional systems by setting the BRD_ALT_CONFIG to “1” so it becomes the SERIAL1 port’s RX input pin.
With this option, SERIAL1_PROTOCOL must be set to “23”, and:
PPM is not supported.
SBUS/DSM/SRXL connects to the PPM pin, but SBUS is not supported without an external inverter.
FPort requires connection to T1 and PPM(R1) via a bi-directional inverter. See FPort Receivers .
CRSF also requires a T1 connection, in addition to PPM (R1), and automatically provides telemetry.
SRXL2 requires a connection to T1 and automatically provides telemetry. Set SERIAL1_OPTIONS to “4”.
Any UART can be used for RC system connections in ArduPilot also, and is compatible with all protocols except PPM (SBUS requires external inversion). See Radio Control Systems for details.
OSD Support¶
The Mamba F405 MK2 has an integrated OSD enabled by OSD_TYPE =` 1 (MAX7456 driver).
PWM Output¶
The Mamba F405 MK2 supports up to 4 PWM outputs. The pads for motor output ESC1 to ESC4 on the above diagram are for the 4 outputs. All 4 outputs support DShot as well as all PWM types.
The outputs are all in one group.
Channels within the same group need to use the same output rate. If any channel in a group uses DShot then all channels in the group need to use DShot.
Battery Monitoring¶
The board has a built-in voltage sensor. The voltage sensor can handle up to 6S LiPo batteries. An external current sense input is also provided.
The correct battery setting parameters are:
BATT_MONITOR = 3 for voltage only or = 4 if external current sense is also used.
BATT_AMP_PERVLT depends on external current sensor used
Compass¶
The Mamba Basic flight controllers do not have a builting compass, but you can attach an external compass using I2C on the SDA and SCL pads or refer to Compass-less Operation .
Firmware¶
Firmware for this board can be found here in sub-folders labeled “MambaF405US-I2C”.
Initial firmware load can be done with DFU by plugging in USB with the bootloader button pressed. Then you should load the “with_bl.hex” firmware. See Loading Firmware onto boards without existing ArduPilot firmware .
Once the initial firmware is loaded you can update the firmware using any ArduPilot ground station software. Updates should be done with the “.apj” firmware files.
 © Copyright 2021, ArduPilot Dev Team.
© Copyright 2021, ArduPilot Dev Team.
Mamba Basic F405 Flight Controllers¶
The Mamba Basic line of flight controllers are produced by [Diatone](https://www.diatone.us).
Features¶
Where to Buy¶
Pinout¶
UART Mapping¶
The UARTs are marked Rn and Tn in the above pinouts. The Rn pin is the receive pin for UARTn. The Tn pin is the transmit pin for UARTn.
RC Input¶
The PPM pin, which by default is mapped to a timer input, can be used for all ArduPilot supported receiver protocols, except CRSF/ELRS and SRXL2 which require a true UART connection. However, FPort, when connected in this manner, will only provide RC without telemetry.
To allow CRSF and embedded telemetry available in Fport, CRSF, and SRXL2 receivers, the SBUS pin can also be configured to be used as true UART1 RX pin for use with bi-directional systems by setting the BRD_ALT_CONFIG to “1” so it becomes the SERIAL1 port’s RX input pin.
With this option, SERIAL1_PROTOCOL must be set to “23”, and:
PPM is not supported.
SBUS/DSM/SRXL connects to the PPM pin, but SBUS is not supported without an external inverter.
FPort requires connection to T1 and PPM(R1) via a bi-directional inverter. See FPort Receivers .
CRSF also requires a T1 connection, in addition to PPM (R1), and automatically provides telemetry.
SRXL2 requires a connection to T1 and automatically provides telemetry. Set SERIAL1_OPTIONS to “4”.
Any UART can be used for RC system connections in ArduPilot also, and is compatible with all protocols except PPM (SBUS requires external inversion). See Radio Control Systems for details.
OSD Support¶
The Mamba F405 MK2 has an integrated OSD enabled by OSD_TYPE =` 1 (MAX7456 driver).
PWM Output¶
The Mamba F405 MK2 supports up to 4 PWM outputs. The pads for motor output ESC1 to ESC4 on the above diagram are for the 4 outputs. All 4 outputs support DShot as well as all PWM types.
The outputs are all in one group.
Channels within the same group need to use the same output rate. If any channel in a group uses DShot then all channels in the group need to use DShot.
Battery Monitoring¶
The board has a built-in voltage sensor. The voltage sensor can handle up to 6S LiPo batteries. An external current sense input is also provided.
The correct battery setting parameters are:
BATT_MONITOR = 3 for voltage only or = 4 if external current sense is also used.
BATT_AMP_PERVLT depends on external current sensor used
Compass¶
The Mamba Basic flight controllers do not have a builting compass, but you can attach an external compass using I2C on the SDA and SCL pads or refer to Compass-less Operation .
Firmware¶
Firmware for this board can be found here in sub-folders labeled “MambaF405US-I2C”.
Initial firmware load can be done with DFU by plugging in USB with the bootloader button pressed. Then you should load the “with_bl.hex” firmware. See Loading Firmware onto boards without existing ArduPilot firmware .
Once the initial firmware is loaded you can update the firmware using any ArduPilot ground station software. Updates should be done with the “.apj” firmware files.
© Copyright 2021, ArduPilot Dev Team.