Mh sensor series arduino схема
32 Кб (ATmega328)
2 Кб для загрузчика
0.5 Кб для загрузчика
8 Кб для загрузчика
2 Кб (ATmega328)
512 байт (ATmega168)
1024 байт (ATmega328)
Arduino Sensor Shield V5.0 + Arduino UNO
На плате расширения находится кнопка сброса параметров или перезагрузки RESET.
Когда на плату подается питание, должен загореться светодиод PWR.
На плате расширения Arduino Sensor Shield V5.0 расположено множество интерфейсов для подключения различных внешних устройств и питания.
SD card interface (интерфейс для подключения карт памяти SD) – имеет 6 выводов, первый вывод обозначен на плате знаком «+». Обозначение выводов: VCC, GND, D11, D10, D13, D12.
Ultrasonic interface (интерфейс для подключения ультразвуковых датчиков) – имеет 4 вывода, первый вывод обозначен на плате знаком «+». Обозначение выводов: VCC, A0, A1, GND.
Интерфейс для подключения внешнего источника питания (блока питания, батареи). Обозначение выводов: GND, VCC.
Колодка питания Arduino, обозначение выводов: RESET, 3V3, 5V, GND, VIN.
Установлено шесть аналоговых входов обозначенных: 0, 1, 2, 3, 4, 5.
Analog IO ports (интерфейс аналоговых входов-выходов) имеет 6 выводов, обозначение выводов: A0, A1, A2, A3, A4, A5. Каждый вход-выход имеет 3 контакта GND, VCC, Signal.
I2C (IIC) port (Inter-Integrated Circuit) – последовательная шина данных для связи интегральных схем. Имеет 4 вывода, обозначение контактов: SCL (Serial CLock), SDA (Serial DAta), «-», «+».
RS232 interface (последовательная шина COM), имеет 4 вывода обозначение выводов: Tx, Rx, «-», «+».
ACP220 wireless module interface (интерфейс для подключения внешнего Wi-Fi модуля ACP220). Имеет 6 входов, обозначение входов: GND, VCC, не задействован, D1, D0, не задействован.
Bluetooth interface (интерфейс для подключения внешнего устройства Bluetooth) имеет 6 выводов. Обозначение выводов: VCC, GND, D1, D0, GND, 3V3.
Digital IO ports (колодка цифровых входов-выходов) имеет 16 выводов. Обозначение выводов: D0, D1, D2, D3, D4, D5, D6, D7, D8, D9, D10, D11, D12, D13, GND, AREF. Каждый вход-выход имеет 3 контакта GND, VCC, Signal. Вывод AREF (опорное напряжение для аналоговых входов).
LCD parallel interface (параллельный порт для подключения жидкокристаллического дисплея) имеет 14 выводов. Обозначение выводов на схеме интерфейсов платы.
LCD serial interface (последовательный порт для подключения жидкокристаллического дисплея) имеет 6 выводов. Обозначение выводов на схеме интерфейсов платы.
Питание платы осуществляется или с Arduino, или от внешних источников питания (блоков питания, батарей). Переключение с источника питания Arduino на внешний источник осуществляется с помощью перемычки SEL. Для питания платы нужно напряжение 5 Вольт.
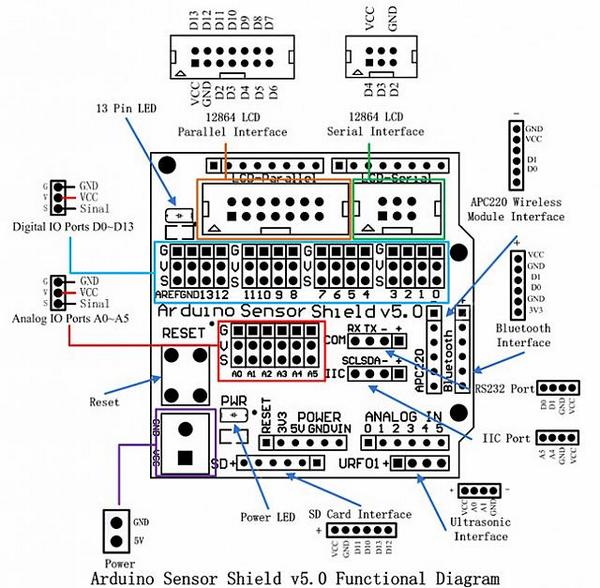
Функциональная схема коммутационной платы Arduino Sensor Shield V5.0
Подключение инфракрасного датчика MH-Series к Arduino
 Еще один из многочисленных возможных подключаемых датчиков к платформе Ардуино это инфракрасный датчик. На самом деле в этом датчике есть не только инфракрасный фотодиод, но и источник этого самого инфракрасного излучения, то есть светодиод. Один из них изучает свет, другой принимает. То есть получается так, что датчик воспринимает свой же отраженный свет.
Еще один из многочисленных возможных подключаемых датчиков к платформе Ардуино это инфракрасный датчик. На самом деле в этом датчике есть не только инфракрасный фотодиод, но и источник этого самого инфракрасного излучения, то есть светодиод. Один из них изучает свет, другой принимает. То есть получается так, что датчик воспринимает свой же отраженный свет.
Это сенсоры так называемой группы MH-Series. В моем конкретном случае, что мне удалось найти из маркировки на корпусе было MH-B. Если попробовать рассказать более подробно, то это не просто два радиоэлемента: фотодиод и светодиод. Это целая маленькая плата.
Давайте взглянем на нее.
 Так на плате есть компаратор, то есть микросхема, которая на основании входных аналоговых сигналов от фотоэлемента сравнивает их значения и переводит в выходной сигнал высокого или низкого уровня, то есть логической 1 или 0. В итоге этот согласованный для логики сигнал и является управляющим для Ардуинки. Есть еще пару светодиодов, это питание и индикатор выходного сигнала, есть резисторы и конденсаторы. Однако на что стоит обратить внимание, так это на переменный резистор. Именно с его помощью можно регулировать чувствительность для срабатывания всего датчика, а значит незначительно изменять расстояние для срабатывания до препятствия, от которого будет отражен свет.
Так на плате есть компаратор, то есть микросхема, которая на основании входных аналоговых сигналов от фотоэлемента сравнивает их значения и переводит в выходной сигнал высокого или низкого уровня, то есть логической 1 или 0. В итоге этот согласованный для логики сигнал и является управляющим для Ардуинки. Есть еще пару светодиодов, это питание и индикатор выходного сигнала, есть резисторы и конденсаторы. Однако на что стоит обратить внимание, так это на переменный резистор. Именно с его помощью можно регулировать чувствительность для срабатывания всего датчика, а значит незначительно изменять расстояние для срабатывания до препятствия, от которого будет отражен свет.
Здесь сразу же надо сказать, что сенсор этот срабатывает примерно с расстояния от 2 до 7 см, то есть датчик «ближнего» действия. Также это расстояние зависит не только от настройки резистора, но и от цвета отражаемой поверхности. Для светлых поверхностей это расстояние значительно увеличивается. Что же, давайте теперь к подключению.
Схема подключения датчика MH-Series к Arduino
На датчике 3 вывода, а значит используем три провода для подключения. При этом два это питание +5 вольт и земля.
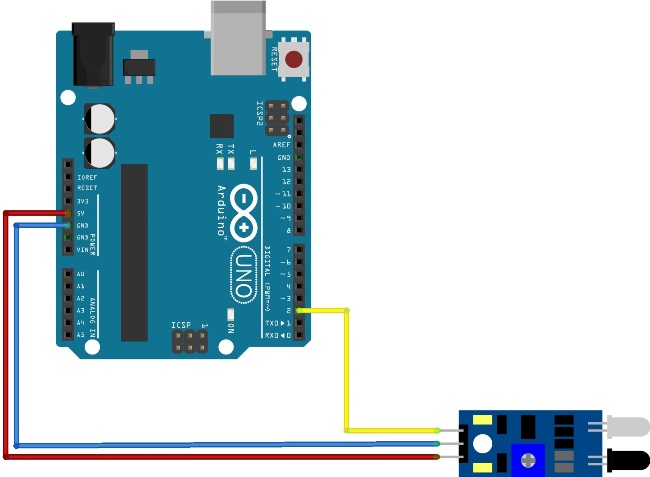
А вот третий провод это как раз логическое значение 1 или 0, о чем я и говорил. Собственно с этим значением и придется работать Ардуино. По логике вещей это значение можно представить в виде аналога обычной кнопки, когда мы нажимая ее получаем либо 1 либо 0. То есть скетч можно взять от скетча с кнопкой и в итоге будет все один в один, как и для этого сенсора.
Скетч для подключения датчика MH-Series к Arduino
Теперь к самому скетчу. Как я и сказал, скетч может быть взят от кнопки, то есть в принципе от любого уже проверенного устройства выдающего логические значения. Описывать работу скетча я не буду, так как там по мне все ясно и понятно. Будут вопросы или дополнения, оставляйте комментарии. Обсудим.
Осталось сказать о том, что такие сенсоры активно применяются в робототехнике для обнаружения препятствия и возможности его объезда, путем изменения траектории движения робота.
Клёвый код
Скриптописание и кодинг
Решаем задачи Абрамян на C. Matrix78
Matrix78. Дана матрица размера $$M \times N$$. Упорядочить ее строки так, чтобы их минимальные элементы образовывали убывающую последовательность.
Решаем задачи Абрамян на C. Matrix77
Matrix77. Дана матрица размера $$M \times N$$. Упорядочить ее столбцы так, чтобы их последние элементы образовывали убывающую последовательность.
Решаем задачи Абрамян на C. Matrix76
Matrix76. Дана матрица размера $$M \times N$$. Упорядочить ее строки так, чтобы их первые элементы образовывали возрастающую последовательность.
Решаем задачи Абрамян на C. Matrix75
Matrix75. Дана матрица размера $$M \times N$$. Элемент матрицы называется ее локальным максимумом, если он больше всех окружающих его элементов. Поменять знак всех локальных максимумов данной матрицы на противоположный. При решении допускается использовать вспомогательную матрицу.
Решаем задачи Абрамян на C. Matrix74
Matrix74. Дана матрица размера $$M \times N$$. Элемент матрицы называется ее локальным минимумом, если он меньше всех окружающих его элементов. Заменить все локальные минимумы данной матрицы на нули. При решении допускается использовать вспомогательную матрицу.
Решаем задачи Абрамян на C. Matrix73
Matrix73. Дана матрица размера $$M \times N$$. После последнего столбца, содержащего только отрицательные элементы, вставить столбец из нулей. Если требуемых столбцов нет, то вывести матрицу без изменений.
Решаем задачи Абрамян на C. Matrix72
Matrix72. Дана матрица размера $$M \times N$$. Перед первым столбцом, содержащим только положительные элементы, вставить столбец из единиц. Если требуемых столбцов нет, то вывести матрицу без изменений.
Решаем задачи Абрамян на C. Matrix71
Matrix71. Дана матрица размера $$M \times N$$. Продублировать столбец матрицы, содержащий ее минимальный элемент.
Решаем задачи Абрамян на C. Matrix70
Matrix70. Дана матрица размера $$M \times N$$. Продублировать строку матрицы, содержащую ее максимальный элемент.
Решаем задачи Абрамян на C. Matrix69
Matrix69. Дана матрица размера $$M \times N$$ и целое число $$K$$ $$(1 \le K \le $$N$$)$$. После столбца матрицы с номером $$K$$ вставить столбец из единиц.
Клёвый код
Скриптописание и кодинг
Решаем задачи Абрамян на C. Matrix78
Matrix78. Дана матрица размера $$M \times N$$. Упорядочить ее строки так, чтобы их минимальные элементы образовывали убывающую последовательность.
Решаем задачи Абрамян на C. Matrix77
Matrix77. Дана матрица размера $$M \times N$$. Упорядочить ее столбцы так, чтобы их последние элементы образовывали убывающую последовательность.
Решаем задачи Абрамян на C. Matrix76
Matrix76. Дана матрица размера $$M \times N$$. Упорядочить ее строки так, чтобы их первые элементы образовывали возрастающую последовательность.
Решаем задачи Абрамян на C. Matrix75
Matrix75. Дана матрица размера $$M \times N$$. Элемент матрицы называется ее локальным максимумом, если он больше всех окружающих его элементов. Поменять знак всех локальных максимумов данной матрицы на противоположный. При решении допускается использовать вспомогательную матрицу.
Решаем задачи Абрамян на C. Matrix74
Matrix74. Дана матрица размера $$M \times N$$. Элемент матрицы называется ее локальным минимумом, если он меньше всех окружающих его элементов. Заменить все локальные минимумы данной матрицы на нули. При решении допускается использовать вспомогательную матрицу.
Решаем задачи Абрамян на C. Matrix73
Matrix73. Дана матрица размера $$M \times N$$. После последнего столбца, содержащего только отрицательные элементы, вставить столбец из нулей. Если требуемых столбцов нет, то вывести матрицу без изменений.
Решаем задачи Абрамян на C. Matrix72
Matrix72. Дана матрица размера $$M \times N$$. Перед первым столбцом, содержащим только положительные элементы, вставить столбец из единиц. Если требуемых столбцов нет, то вывести матрицу без изменений.
Решаем задачи Абрамян на C. Matrix71
Matrix71. Дана матрица размера $$M \times N$$. Продублировать столбец матрицы, содержащий ее минимальный элемент.
Решаем задачи Абрамян на C. Matrix70
Matrix70. Дана матрица размера $$M \times N$$. Продублировать строку матрицы, содержащую ее максимальный элемент.
Решаем задачи Абрамян на C. Matrix69
Matrix69. Дана матрица размера $$M \times N$$ и целое число $$K$$ $$(1 \le K \le $$N$$)$$. После столбца матрицы с номером $$K$$ вставить столбец из единиц.
Light sensing with the Flying-Fish series from MH
. or in other words: LDR Photoresistor on a breakout board
Hardware components
| LDR Photoresistor — Flying Fish-series from MH |
| Arduino Nano R3 |
| Breadboard (generic) |
| Jumper wires (generic) |
| 3 pieces |
Software apps and online services

| Arduino IDE |
There are a number of different sensors for measuring light available on the market . it is mainly about the brightness of ambient light, sometimes also about invisible infrared light from cheap to expensive.
Today we take a look at the light sensor from the Flying Fish series from MH: Here, a conventional LDR photoresistor is applied to a breakout board and equipped with comfort functions such as resistors and control lights. In addition to the 4 leads, there is also a potentiometer.
So you have the choice between the state measurement: it is light or dark on the D0-lead and an analog measurement of the voltage on the A0-lead.
You suspect it already: the code is known from the Arduino IDE example sketches and reads in the different voltage on the A0 PIN of the Arduino.
You can view the log via the Arduino IDE’s serial monitor: