GyverCore – быстрое и лёгкое ядро для Arduino
Версия 2.0 от 01.02.2020
Быстрое и лёгкое ядро для Arduino IDE с расширенной конфигурацией.
Основано на оригинальном ядре Arduino версии 1.8.9, большинство функций заменены на более быстрые и лёгкие аналоги, убрано всё лишнее и не относящееся к микроконтроллеру ATmega328p, убран почти весь Wiring-мусор, код упрощён и причёсан. Добавлено несколько функций и интересных вариантов компиляции.
Разработано by Александр AlexGyver и Egor ‘Nich1con’ Zaharov
Известные баги
- На компиляторе версии 8 не работает библиотека ServoSmooth. Будьте бдительны с этой версией!
- Вариант “GyverUART вместо Serial” не работает для Ethernet модулей
Установка
Автоматическая
- Открой the Arduino IDE
- Зайди в Файл > Настройки
- Вставь этот адрес в Дополнительные ссылки для менеджера плат:
- Открой Инструменты > Плата > Менеджер плат…
- Подожди загрузку списка
- Листай в самый низ, пока не увидишь GyverCore
- Жми Установка
- Закрой окно
- Выбери плату в Инструменты > Плата > GyverCore > ATmega328 based
- Готово!
- Примечание: новая версия компилятора по умолчанию идёт для Windows 64, если нужно для win32 или Linux – нужно установить вручную. Идём в C:\Users\Username\AppData\Local\Arduino15\packages\GyverCore\hardware\avr\2.0\tools\avr-gcc, удаляем оттуда всё и кладём туда файлы из архива нужной версии (папка avr-gcc в корне данного репозитория)
Ручная
- Файлы из папки GyverCore в этом репозитории положить по пути C:\Users\Username\AppData\Local\Arduino15\packages\GyverCore\hardware\avr\2.0\
- Версия компилятора по умолчанию для Windows 64, если нужна другая – читай выше как установить
Изменения
Облегчено и ускорено
Время выполнения функций, мкс (при 16 МГц кварце)
| Функция | Arduino | GyverCore | Быстрее в, раз |
|---|---|---|---|
| millis | 0.69 us | 0.69 us | – |
| micros | 0.81 us | 0.81 us | – |
| pinMode | 2.56 us | 0.25 us | 10.25 |
| digitalWrite | 2.40 us | 0.125 us | 19 |
| digitalWrite PWM | 3.25 us | 0.30 us | 7.4 |
| digitalRead | 2.80 us | 0.063 us | 46 |
| analogWrite | 3.8 us | 0.33 us | 8.4 |
| analogRead | 111.2 us | 5.63 us | 20 |
| analogReference | 0.19 us | 0.19 us | – |
| attachInterrupt | 1.06 us | 0.8 us | – |
| detachInterrupt | 0.5 us | 0.25 us | 2 |
| tone | 9.0 us | 2.25 us | 4 |
| shiftIn | 111 us | 8 us | 13 |
| shiftOut | 117 us | 24 us | 4.5 |
Занимаемое место, Flash, байт
| Функция | Arduino | GyverCore | Разница, Flash |
|---|---|---|---|
| millis | 26 | 24 | 2 |
| micros | 24 | 20 | 4 |
| pinMode | 114 | 24 | 90 |
| digitalWrite | 200 | 24 | 176 |
| digitalRead | 190 | 24 | 166 |
| analogWrite | 406 | 48 | 358 |
| analogRead | 32 | 72 | -40 |
| analogReference | 0 | 22 | -22 |
| attachInterrupt | 212 | 180 | 32 |
| detachInterrupt | 198 | 150 | 48 |
| tone | 1410 | 740 | 670 |
| Serial begin | 1028 | 166 | 862 |
| print long | 1094 | 326 | 768 |
| print string | 2100 | 1484 | 616 |
| print float | 2021 | 446 | 1575 |
| parseInt | 1030 | 214 | 816 |
| readString | 2334 | 1594 | 740 |
| parseFloat | 1070 | 246 | 824 |
Примечание: analogRead и analogReference имеют расширенную функциональность и весят чуть больше
Скетч, состоящий из однократного вызова перечисленных выше функций, занимает
- Ядро Arduino: 3446 байт (11%) Flash / 217 байт (10%) SRAM
- Ядро GyverCore: 1436 байт (4%) Flash / 94 байт (4%) SRAM
- Ядро Arduino: 444 байт (1%) Flash / 9 байт (0%) SRAM
- Ядро GyverCore: 202 байт (0%) Flash / 0 байт (0%) SRAM
Все библиотеки, работа которых зависит от стандартных функций (время, I/O), работают быстрее:
- SPI: отправка байта данных по адресу (опустить latch, отправить адрес, отправить байт, поднять latch) занимает:
- Стандартное ядро: 14 мкс (71 кГц)
- GyverCore: 6 мкс (164 кГц)
uart является практически полным аналогом Serial, но весит в разы меньше и работает быстрее. Список функций смотри ниже в Добавлено.
Добавлено
- Расширена подсветка синтаксиса (вплоть до названий регистров и битов)
- Макрос bitToggle(value, bit), инвертирует состояние бита bit в байте value
- Быстрая функция digitalToggle(pin), инвертирует состояние пина
- Расширенная работа с АЦП
- Предделитель АЦП по умолчанию изменён на 4, это в разы ускоряет analogRead, измерения по нашим тестам менее точными не становятся
- Убрано в 2.0 analogStartConvert(byte pin) – начать преобразование с выбранного пина
- Убрано в 2.0 analogGet() – получить преобразованное значение (между analogStartConvert и analogGet можно выполнять действия, в отличие от ожидания в analogRead())
- analogPrescaler(uint8_t prescl) – установить предделитель для АЦП (2, 4, 8, 16, 32, 64, 128) – управляет скоростью работы АЦП (скоростью оцифровки). Prescaler:
- 2: 3.04 мкс (частота оцифровки 329 000 кГц)
- 4: 4.72 мкс (частота оцифровки 210 000 кГц)
- 8: 8.04 мкс (частота оцифровки 125 000 кГц)
- 16: 15.12 мкс (частота оцифровки 66 100 кГц)
- 32: 28.04 мкс (частота оцифровки 35 600 кГц)
- 64: 56.04 мкс (частота оцифровки 17 800 кГц)
- 128: 112 мкс (частота оцифровки 8 900 Гц)
- Убрано в 2.0 В функции analogRead(pin) вместо пина можно указать INTERNAL (получить значение внутреннего опорного напряжения) или THERMOMETR (получить приблизительную температуру МК). Примечание: нужно установить предделитель 128
- Добавлен очень быстрый и лёгкий uart (аналог классу Serial)
- uart.begin() – запустить соединение по последовательному порту со скоростью 9600
- uart.begin(baudrate) – запустить соединение по последовательному порту со скоростью baudrate
- uart.end() – выключить сериал
- uart.peek() – вернуть крайний байт из буфера, не убирая его оттуда
- uart.flush() – ждать принятия данных
- uart.clear() – очистить буфер
- uart.read() – вернуть крайний байт из буфера, убрав его оттуда
- uart.write(val) – запись в порт
- uart.print(val) – печать в порт (числа, строки, char array)
- uart.println(val) – печать в порт с переводом строки
- uart.available() – возвразает true, если в буфере что-то есть
- uart.setTimeout(val) – установить таймаут для функций парсинга (по умолчанию 100 мс)
- uart.parseInt() – принять целочисленное число
- uart.readString() – принять строку
- uart.readStringUntil() – принять строку по терминатору
- uart.parseFloat() – принять число float
- uart.parsePacket(dataArray) – принять пакет вида $50 60 70; в массив dataArray (смотри пример)
- Добавлены расширенные настройки платы из меню платы
- Выбор загрузчика
- Выбор источника тактирования (внешний, внутренний)
- Сохранять или очищать EEPROM
- Вывод тактирования на ногу МК
- Возможность отключить системный таймер 0 и освободить для себя вектор прерывания ovf
- Замена Serial быстрым uart
- Настройка или отключение B.O.D.
- Возможность отключить стандартную инициализацию периферии
- Выбор версии компилятора
Убрано
- Убраны всякие сервисные файлы и прочий хлам, не относящийся к ATmega328 (wifi, USB), почищен код. Ядро полностью совместимо с остальными библиотеками, ничего из стандартных функций не вырезано.
- analogWrite(pin, 255) не заменяется на digitalWrite(pin, HIGH) для корректной работы 10 бит ШИМ. Шумы при работе ШИМ на заполнении 255 отсутствуют. Чтобы выключить шим, нужно сделать пин analogWrite 0, также генерацию отключает digitalWrite любого уровня на этот пин.
Настройки платы
Bootloader – выбор загрузчика (требует перезаписи загрузчика):
- old bootloader – cтарый загрузчик (стоит на большинстве китайских плат)
- Новый с optiBoot, киатйцы тоже потихоньку начинают продавать платы с ним
- optiBoot v8 – optiboot самой свежей версии
- Вариант without bootloader для прошивки скетча во всю доступную (32 кБ) память МК
Clock – выбор частоты и источника тактирования (требует перезаписи загрузчика):
- External 16 MHz (стандартный вариант для платы Nano 16 МГц)
- External 8 MHz (стандартный вариант для платы Nano 8 МГц)
- Internal 8 MHz (внутренний генератор: можно работать с голым камнем без кварца)
- Internal 1 MHz (внутренний генератор)
- Internal 128 kHz (внутренний генератор) – загрузчик будет стёрт! Используйте without bootloader!
- Примечания:
- Функции времени (delay/millis) скорректированы под выбранную частоту
- После прошивки на частоту 128 кГц дальнейшая загрузка по ISP возможна только с понижением частоты ISP на стороне программатора!
Save EEPROM – сохранять EEPROM после перепрошивки (очистки) камня (требует перезаписи загрузчика):
- enable – включить
- disable – выключить
Clock Out – на пине D8 (NANO/Mini) будет продублировано тактирование с частотой источника (требует перезаписи загрузчика):
- disable – выключить
- enable – включить
System timer – преднастройка таймера 0:
- enable – таймер 0 настроен по умолчанию, работают функции времени delay/millis
- disable – вектор прерываний OVF таймера 0 освобождён для пользователя, delay/delayMicroseconds работают, millis/micros – нет
- Примечание: при отключенном таймере 0 функции delay и delayMicroseconds автоматически заменяются на _delay_ms и _delay_us из avr/util.h, а millis и micros заменены на 0
Serial – работа с Serial:
- default Serial – при работе с Serial работает стандартная библиотека Serial
- GyverUART – все обращения к Serial в коде автоматически заменяются на uart из библиотеки GyverUART – код становится быстрее и легче!
- Примечание: в GyverUART нет функций find, findUntil, readBytes и readBytesUntil!
B.O.D. (Brown-out detector) – reset при падении напряжения (требует перезаписи загрузчика):
- disable – отключен
- 1.8V – сброс при напряжении питания ниже 1.7-2.0V
- 2.7V (default) – сброс при напряжении питания ниже 2.5-2.9V
- 4.3V – сброс при напряжении питания ниже 4.1-4.5V
Initialization – инициализация периферии (таймеры, ацп) в начале скетча:
- enable – стандартная инициализация
- disable – инициализация отключена
Compiler version – версия компилятора
- default v5.4.0 – встроенная в IDE версия компилятора
- avr-gcc v8.3.0 – новая версия компилятора: компилирует быстрее, скетчи весят меньше! Билд взял отсюда
Больше контроля!
Для большего контроля за периферией микроконтроллера рекомендую попробовать следующие наши библиотеки:
- directTimers – полный контроль над таймерами/счётчиками ATmega328
- directADC – полный контроль над АЦП и компаратором ATmega328
- GyverPWM – расширенная генерация ШИМ сигнала со всеми настройками и режимами
- GyverTimer012 – очень простая и лёгкая библиотека для контроля прерываний по таймерам 0/1/2
- GyverWDT – полный контроль за WDT (прерывания, перезагрузка)
Скачать все библиотеки можно из репозитория
Полезные алгоритмы Arduino. Обновляемая статья!
На этой странице буду публиковать некоторые полезные алгоритмы и примеры для ваших проектов, которые накопились у меня за годы разработки собственных. Статья обновляется по мере моей ленивости, так что иногда заходите, проверяйте =)
НЕСКОЛЬКО ТРЮКОВ
- Автоформатирование – Arduino IDE умеет автоматически приводить ваш код в порядок (имеются в виду отступы, переносы строк и пробелы). Для автоматического форматирования используйте комбинацию CTRL+T на клавиатуре, либо Инструменты/АвтоФорматирование в окне IDE. Используйте чаще, чтобы сделать код красивым (каноничным, классическим) и более читаемым для других!
- Скрытие частей кода – сворачивайте длинные функции и прочие куски кода для экономии места и времени на скроллинг. Включается здесь: Файл/Настройки/Включить сворачивание кода
Не используйте мышку! Чем выше становится ваш навык в программировании, тем меньше вы будете использовать мышку (да-да, как в фильмах про хакеров). Используйте обе руки для написания кода и перемещения по нему, вот вам несколько полезных комбинаций и хаков, которыми я пользуюсь ПОСТОЯННО:
- Ctrl+← , Ctrl+→ – переместить курсор влево/вправо НА ОДНО СЛОВО
- Home , End – переместить курсор в начало/конец строки
- Shift+← , Shift+→ – выделить символ слева/справа от курсора
- Shift+Ctrl+← , Shift+Ctrl+→ – выделить слово слева/справа от курсора
- Shift+Home , Shift+End – выделить все символы от текущего положения курсора до начала/конца строки
- Ctrl+Z – отменить последнее действие
- Ctrl+Y – повторить отменённое действие
- Ctrl+C – копировать выделенный текст
- Ctrl+X – вырезать выделенный текст
- Ctrl+V – вставить текст из буфера обмена
- Ctrl+U – загрузить прошивку в Arduino
- Ctrl+R – скомпилировать (проверить)
- Ctrl+Shift+M – открыть монитор порта
Также для отодвигания комментариев в правую часть кода используйте TAB, а не ПРОБЕЛ. Нажатие TAB перемещает курсор по некоторой таблице, из-за чего ваши комментарии будут установлены красиво на одном расстоянии за вдвое меньшее количество нажатий!
Питание от пинов – во время разработки прототипов без брэдборда всегда не хватает пинов для питания датчиков и модулей. Так вот, слабые (с потреблением тока менее 40 мА) 5 Вольтовые датчики можно питать от любых пинов! Достаточно сформировать пин как выход, и подать на него нужный сигнал (HIGH – 5 Вольт, LOW – GND).
Пример: подключаем трёхпиновый датчик звука, не используя пины 5V и GND
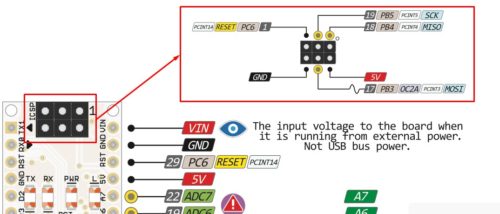
Питание от штекера для программатора. Вы наверняка задавались вопросом, а зачем на Arduino NANO на краю платы расположены 6 пинов? Это порт для подключения ISP программатора. Что он делает в списке лайфхаков? Вот вам фото распиновки, используйте!
- Использовать библиотеку энергосбережения GyverPower, есть подробный урок
- В паре с библиотекой сделать несколько модификаций: отключить светодиод питания и отрезать левую ногу регулятора напряжения. ВНИМАНИЕ! Резать ногу регулятору можно только в том случае, если плата питается от источника 3-5 Вольт в пины 5V и GND.
![]()
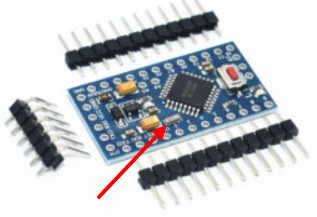
Arduino Pro Mini бывает двух типов: с кварцем на 16 МГц и 8 МГц. Китайцы обычно не подписывают плату, и есть риск перепутать разные платы, если у вас есть и те и те. На средних по цене Pro Mini стоит качественный полноразмерный кварц в овальном металлическом корпусе, на нём крупно написана цифра, обозначающая частоту в Мгц:

На недорогих платах стоит крошечный дешёвый кварц в SMD корпусе, вот он:
 Берём лупу и смотрим: 16 МГц кварц маркируется примерно как “A1” or “A’N”, 8 МГц кварц маркируется “80’0” или что-то в этом стиле. Ну вот, теперь вы не перепутаете свои Pro Mini!
Берём лупу и смотрим: 16 МГц кварц маркируется примерно как “A1” or “A’N”, 8 МГц кварц маркируется “80’0” или что-то в этом стиле. Ну вот, теперь вы не перепутаете свои Pro Mini!
РАБОТА С ПЕРИФЕРИЕЙ (ДЛЯ ATMEGA328)
Или облегчённые и ускоренные куски ядра Arduino и не только