Quick guide
To get your Arduino to control a plotter, following steps are needed:
Windows USB driver
 Connect your Arduino with your PC, on windows 10 the needed USB driver will be installed automatically, if not: the cheap Arduino clones often uses a CH340 chip. Check here for more information https://www.google.de/search?q=arduino+ch340.
Connect your Arduino with your PC, on windows 10 the needed USB driver will be installed automatically, if not: the cheap Arduino clones often uses a CH340 chip. Check here for more information https://www.google.de/search?q=arduino+ch340.
Grbl firmware
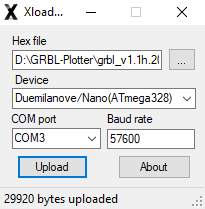 Download and unzip GRBL-Plotter. Start the program XLoader.exe. Select the desired firmware, correct device and the correct com port, then upload the firmware. With the shown settings, the upload took 18 seconds.
Download and unzip GRBL-Plotter. Start the program XLoader.exe. Select the desired firmware, correct device and the correct com port, then upload the firmware. With the shown settings, the upload took 18 seconds.
- grbl_v1.1h.20190825.hex is the latest regular grbl firmware for Arduino uno and nano, from https://github.com/gnea/grbl
- grbl_v1.1f_Servo.hex as above, but with Spindle-PWM adapted to RC-Servo specification (1ms — 2ms), from https://github.com/cprezzi/grbl-servo see also ‘use of servo’ below
- grbl_v1.1f_Servo_switch_dir_step.hex as above, but with Spindle-PWM adapted to RC-Servo specification (1ms — 2ms) and step/dir pins swapped for use with CNC Shield V4 for Arduino nano (see below), from https://github.com/cprezzi/grbl-servo
- grbl-Mega-5X-v1.1l.20190605.hex 5 axis version for Arduino Mega2560 only, from https://github.com/fra589/grbl-Mega-5X
After successful upload, close XLoader and reset the controller.
1st connection
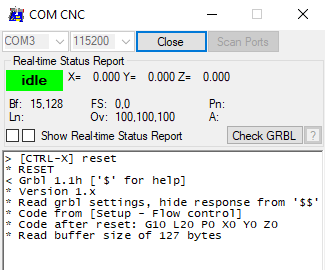 Install GRBL-Plotter by starting ‘setup.exe’ from the unzipped folder. Start GRBL-Plotter and select the correct COM-port for the controller. After successful connection, grbl sends a start-up message «Grbl 1.1h [‘$’ for help]».
Install GRBL-Plotter by starting ‘setup.exe’ from the unzipped folder. Start GRBL-Plotter and select the correct COM-port for the controller. After successful connection, grbl sends a start-up message «Grbl 1.1h [‘$’ for help]».
Now the buttons inside the GUI are enabled and the stepper motors can be controlled.
Configuration of grbl
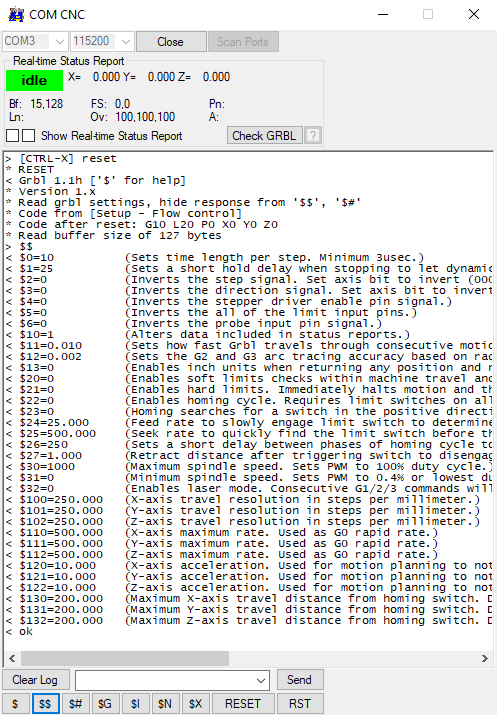 After pressing «$$», grbl lists the stepper motor settings, which must be adapted for each machine. Check the grbl-Wiki for more information. The screenshoot shows the initial settings after the installation of grbl.
After pressing «$$», grbl lists the stepper motor settings, which must be adapted for each machine. Check the grbl-Wiki for more information. The screenshoot shows the initial settings after the installation of grbl.
The main settings are $3, $10x, $11x (x=0,1 or 2 depending on axis) to get the stepper motors running in the correct direction. The correct direction means:
- +X = to the right
- +Y = to the back
- +Z = upwards
Note: a too large number for $10x (steps/mm) and $11x (max. speed) will cause problems.
The product of $10x and $11x must stay below 1800000 to avoid pin frequencies above 30 kHz.
E.g. $100=250, $110 = 7200 is at the edge.

Alternative setup form opens via $$ command or ‘Machine Control’ menu item.
Spindle-PWM and use of a servo:
The pulse width modulation (PWM) for speed control of a motor or power control of a laser, is generated via a special pin function (hardware PWM) inside the ATmega328 (the microcontroller of the Arduino Uno / nano) on pin 11 (PB3, OC2A). This means the pin for the output of the PWM cannot be changed.
- By default, the PWM frequency is set to 1 kHz. The duty cycle can be controlled between 0% and 100% to get an control voltage of 0V to 5V for the spindle or laser.
- RC servos usually require a PWM signal of 50 Hz with a pulse width of 1 ms to 2 ms. The duty cycle is then just in the range of 5% to 10% — not suitable to control a spindle or laser.
Regular grbl: «By default, the spindle PWM frequency is 1kHz, which is the recommended PWM frequency for most current Grbl-compatible lasers system. If a different frequency is required, this may be altered by editing the cpu_map.h file.»
Source: https://github.com/gnea/grbl/wiki/Grbl-v1.1-Laser-Mode#laser-mode-operation
Adapted grbl: «This is a special version with servo support (swichable in config.h) The PWM frequency is set to 61Hz (prescaler 1/1024). The pulse width range is 0.5 — 2.5ms.» (Duty cycle it then from 3% to 15%).
Note: internally the PWM range goes from 7 (0.5 ms pulse width) to 38 (2.5 ms pulse width), which results to 32 possible different servo positions (probably less, because the regular range is from 1 ms to 2 ms). Source: https://github.com/cprezzi/grbl-servo
Common hardware
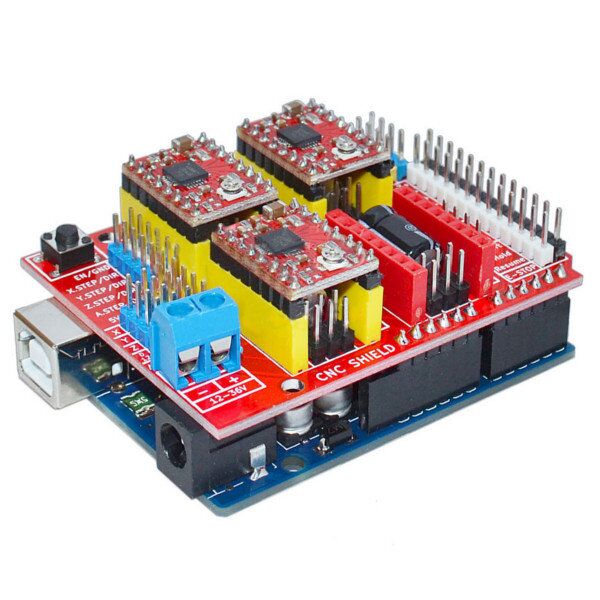
The following information refers to cheap (counterfeit?) boards that are available on ebay for 12€ to 15€ (including shield, arduino, A4988 drivers and USB cable).
 The CNC shield V3 for Arduino Uno was designed for grbl 0.9. Because of a change in the pin-out in grbl version 1.1 (pin 11 and 12 are swapped), the spindle-pwm signal can be found on the Z+ pin. Check schematic here.
The CNC shield V3 for Arduino Uno was designed for grbl 0.9. Because of a change in the pin-out in grbl version 1.1 (pin 11 and 12 are swapped), the spindle-pwm signal can be found on the Z+ pin. Check schematic here.
My recommendation:
- Use the original grbl version 1.1 configuration (no pin-swap in config.h / cpu_map.h)
- Connect the spindle/laser/servo at CNC-Shield pin ‘Z-Endstop’, if you don’t need PWM to control the speed, then just send 100% speed (usually S1000)
- Connect the Z end switch with CNC-Shield pin ‘Spindle Enable’
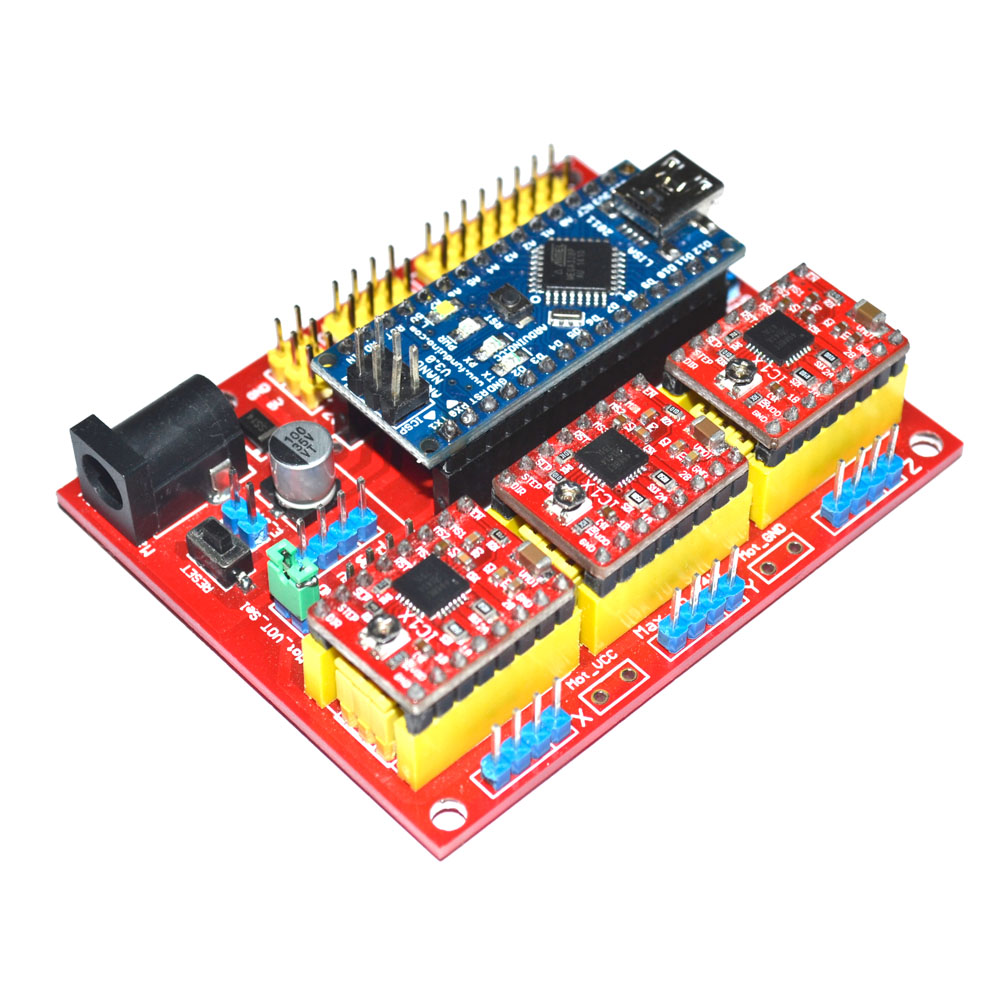 The CNC shield V4 for Arduino nano shows a wrong layout for the micro-step jumpers. Check this link. Also step and dir-signals are swapped, which needs a adapted grbl version. I used this board at my foldable plotter. The adapted grbl firmware can be found in the GRBL plotter setup (grbl_v1.1f_Servo_switch_dir_step.hex).
The CNC shield V4 for Arduino nano shows a wrong layout for the micro-step jumpers. Check this link. Also step and dir-signals are swapped, which needs a adapted grbl version. I used this board at my foldable plotter. The adapted grbl firmware can be found in the GRBL plotter setup (grbl_v1.1f_Servo_switch_dir_step.hex).
Как настроить GRBL и управлять станком с ЧПУ на Arduino
Если вы хотите собрать или находитесь в процессе создания собственного станка с ЧПУ, то, скорее всего, вы встретите термин GRBL. Итак, в этом руководстве мы узнаем, что такое GRBL, как установить и как использовать его для управления вашим станком с ЧПУ на базе Arduino.
Кроме того, мы узнаем, как использовать Universal G-code Sender, популярное программное обеспечение контроллера GRBL с открытым исходным кодом.
Что такое GRBL?
GRBL — это программное обеспечение или прошивка с открытым исходным кодом, которая позволяет управлять движением для станков с ЧПУ. Мы можем легко установить прошивку GRBL на Arduino и сразу же получить недорогой высокопроизводительный контроллер ЧПУ. GRBL использует G-код в качестве ввода и выводит управление движением через Arduino.
Для лучшего понимания мы можем взглянуть на следующую схему:
Из схемы мы можем видеть место GRBL в принципе работы станка с ЧПУ. Это прошивка, которую нам нужно установить или загрузить в Arduino, чтобы она могла управлять шаговыми двигателями станка с ЧПУ. Другими словами, функция прошивки GRBL заключается в переводе G-кода в движение двигателя.
Требуемое оборудование
- Arduino — Как мы уже говорили, нам понадобится Arduino для установки GRBL. В частности, нам нужна плата Arduino на базе Atmega 328, а это означает, что мы можем использовать либо Arduino UNO, либо Nano.
- Шаговые двигатели. Очевидно, что шаговые двигатели обеспечивают движение машины.
- Драйверы — для управления шаговыми двигателями нам нужны драйверы, и распространенный выбор, когда дело доходит до небольших станков с ЧПУ DIY (использующих шаговые двигатели NEMA 14 или 17), — это драйверы A4988 или DRV8825.
- Arduino CNC Shield — для подключения шаговых драйверов к Arduino самый простой способ — использовать Arduino CNC Shield. Он использует все контакты Arduino и обеспечивает простой способ подключения всего, шаговых двигателей, шпинделя / лазера, концевых выключателей, охлаждающего вентилятора и т. д.
Обратите внимание, что это только основные электронные компоненты, которые нам нужны, чтобы понять, как работает станок с ЧПУ.
В качестве примера того, как все должно быть соединено, мы можем взглянуть на одну из машин для резки пенопласта с ЧПУ сделанную своими руками.
Здесь вы можете проверить и получить основные электронные компоненты, необходимые для сборки этого станка с ЧПУ:
Главный инструмент этого станка с ЧПУ — это горячая проволока, которая может легко расплавить или прорезать пенополистирол и придать любую форму, которую мы хотим.
Как установить GRBL
Во-первых, чтобы иметь возможность установить или загрузить GRBL в Arduino, нам понадобится Arduino IDE .
Загрузите файл .ZIP и выполните следующие действия:
- Откройте файл grbl-master.zip и извлеките файлы
- Откройте IDE Arduino, перейдите в Sketch> Включить библиотеку> Добавить библиотеку .ZIP…
Перейдите в извлеченную папку «grbl-master», в ней выберите папку «grbl» и щелкните открытый файл. Теперь нам нужно использовать GRBL как библиотеку Arduino.
- Затем перейдите в Файл> Примеры> grbl> grblUpload. Откроется новый скетч, и нам нужно загрузить его на плату Arduino. Код может выглядеть странно, так как это всего лишь одна строка, но не беспокойтесь, все происходит в фоновом режиме в библиотеке. Итак, нам просто нужно выбрать плату Arduino, COM-порт и нажать эту кнопку загрузки, и все готово.
Конфигурация GRBL
На этом этапе мы должны настроить GRBL для нашей машины. Мы можем сделать это через Serial Monitor IDE Arduino. Как только мы откроем Serial Monitor, мы получим сообщение типа «Grbl 1.1h [‘$’ for help]». Если вы не видите это сообщение, убедитесь, что вы изменили скорость передачи данных на 115200.
Если мы введем «$$», мы получим список команд или текущих настроек, и они будут выглядеть примерно так:
$100 = 250 000 (x, шаг / мм)
$101 = 250 000 (y, шаг / мм)
$102 = 3200 000 (z, шаг / мм)
$110 = 500.000 (x макс. Скорость, мм / мин)
$111 = 500.000 (y макс. Скорость, мм / мин)
$ 112 = 500.000 (макс. скорость z, мм / мин)
$ 120 = 10.000 (ускорение x, мм / сек ^ 2)
$ 121 = 10.000 (ускорение y, мм / сек ^ 2)
$ 122 = 10.000 (ускорение z, мм / сек ^ 2)
Все эти команды могут или должны быть настроены в соответствии с нашим станком с ЧПУ. Например, с первой командой, $100 = 250,000 (x, шаг / мм), мы можем отрегулировать шаги на мм машины, или мы можем указать, сколько шагов должен сделать двигатель, чтобы наша ось X сместилась на 1 мм.
Однако я бы посоветовал оставить эти настройки как есть. Есть более простой способ настроить их в соответствии с нашей машиной с помощью программного обеспечения контроллера, который мы объясним в следующем разделе.
Контроллер GRBL
Итак, после того, как мы установили прошивку GRBL, теперь наш Arduino знает, как читать G-код и как управлять станком с ЧПУ в соответствии с ним. Однако, чтобы отправить G-код на Arduino, нам нужен какой-то интерфейс или программное обеспечение контроллера, которое сообщит Arduino, что делать. На самом деле для этого существует множество программ как с открытым кодом, так и коммерческих, подробно о них вы можете узнать из нашей статьи. Конечно, мы будем придерживаться открытого исходного кода, поэтому в качестве примера мы будем использовать Univarsal G-code Sender.
Как использовать универсальный отправитель G-кода
В этом примере я буду использовать версию платформы 2.0. После загрузки нам нужно извлечь zip-файл, перейти в папку «bin» и открыть любой из исполняемых файлов «ugsplatfrom». На самом деле это программа JAVA, поэтому для запуска этой программы сначала необходимо установить среду выполнения JAVA .
Как только мы откроем универсальный отправитель G-кода, сначала нам нужно настроить машину и настроить параметры GRBL, показанные ранее. Для этой цели мы воспользуемся мастером настройки UGS, который намного удобнее, чем вводить команды вручную через Serial Monitor IDE Arduino.
Первый шаг здесь — выбрать скорость передачи, которая должна быть 115200, и порт, к которому подключен наш Arduino. Как только мы подключим Univarsal G-code Sender к Arduino, на следующем шаге мы сможем проверить направление движения двигателей.
При необходимости мы можем изменить направление с помощью мастера или вручную переключить соединение двигателя на Arduino CNC Shield.
На следующем шаге мы можем настроить параметр шагов / мм, о котором мы упоминали ранее. Здесь гораздо проще понять, как его настроить, потому что мастер настройки вычислит и сообщит нам, до какого значения мы должны обновить параметр.
Значение по умолчанию — 250 шагов / мм. Это означает, что если мы нажмем кнопку перемещения «x +», двигатель сделает 250 шагов. Теперь, в зависимости от количества физических шагов двигателя, выбранного шагового разрешения и типа передачи, машина будет перемещаться на некоторое расстояние. Используя линейку, мы можем измерить фактическое перемещение машины и ввести это значение в поле «Фактическое перемещение». На основании этого мастер рассчитает и сообщит нам, на какое значение следует изменить параметр шаги / мм.
В моем случае станок сдвинулся на 3 мм. В соответствии с этим мастер предложил обновить параметр шаги / мм до значения 83.
После обновления этого значения станок теперь движется правильно, 1 мм в программном обеспечении означает 1 мм для станка с ЧПУ.
В консоли UGS, когда мы выполняем каждое действие, мы можем видеть выполняемые команды. Мы можем заметить, что, обновив параметр steps / mm, программа UGS фактически отправила в Arduino или прошивку GRBL команду, о которой мы упоминали ранее. Это было значение по умолчанию: $100 = 250 000 (x, шаг / мм), и теперь мы обновили значение до 83 шагов на мм: $100 = 83.
На следующем этапе мы можем включить концевые выключатели и проверить, правильно ли они работают.
В зависимости от того, являются ли они нормально разомкнутым или нормально замкнутым соединением, мы также можем инвертировать их здесь.
Здесь стоит отметить, что иногда нам нужно отключить концевой выключатель оси Z. Так было сj станком для резки пенопласта с ЧПУ, где мне не нужен был концевой выключатель оси Z, и мне пришлось отключить его, чтобы иметь возможность правильно разместить станок. Итак, для этого нам нужно отредактировать файл config.h, который находится в папке библиотеки Arduino (или Documents \ Arduino \ libraries).
Здесь нам нужно найти линии цикла возврата в исходное положение и прокомментировать установку по умолчанию для 3-х осевого станка с ЧПУ и раскомментировать настройку для 2-х осевых станков. Чтобы изменения вступили в силу, нам нужно сохранить файл и повторно загрузить эскиз grblUpload на нашу плату Arduino.
Тем не менее, на следующем шаге мы можем либо включить, либо отключить возвращение в исходное положение фрезерной обработки с ЧПУ.
Используя кнопку «Возврат в исходное положение», машина начнет движение к концевым выключателям. Если все пойдет наоборот, мы можем легко изменить направление.
Наконец, на последнем шаге мастера настройки мы можем включить мягкие ограничения для нашего станка с ЧПУ.
Мягкие ограничения не позволяют машине выходить за пределы установленной рабочей зоны.
Заключение
Итак, благодаря прошивке GRBL и Arduino мы можем легко настроить и запустить наш DIY-станок с ЧПУ. Конечно, в этом руководстве мы рассмотрели только основы, но я думаю, что этого было достаточно, чтобы понять, как все работает и как запустить и запустить ваш первый станок с ЧПУ.
Конечно, доступно множество других настроек и функций, так как GRBL действительно совместима с прошивкой контроллера ЧПУ. Все это подробно объясняется в документации GRBL, так что вы всегда можете проверить их на их вики-странице на github.com .
Кроме того, существует множество других программ контроллера GRBL с открытым исходным кодом, таких как Universal G-code Sender, и вот несколько: GRBLweb (веб-браузер), GrblPanel (графический интерфейс Windows), grblControl (графический интерфейс Windows / Linux), Easel (на основе браузера) и т. д. Вы должны изучить их и посмотреть, какой из них вам больше подходит.