Arduino и шаговый мотор
Описание
Шаговый мотор, в отличие от обычного мотора постоянного вращения, вращается пошагово и позволяет точно установить свой вал на заданный угол. В отличие от сервопривода не имеет обратной связи по углу поворота (не знает, где сейчас находится вал), но зато может вращаться без ограничений. Шаговые моторы используются в ЧПУ станках и прочих устройствах с точным позиционированием частей механизма (2D/3D принтеры, манипуляторы, плоттеры…). В наборе GyverKIT идёт шаговый мотор 28BYJ-48 с драйвером ULN2003:

- Питание: 5V
- Шагов на оборот (сам мотор): 32
- Передаточное отношение редуктора: 1:63.68395
- Шагов на оборот (на выходном валу): 2038
- Максимальная скорость (шагов в секунду): 400
- Максимальная скорость (оборотов в минуту): 12
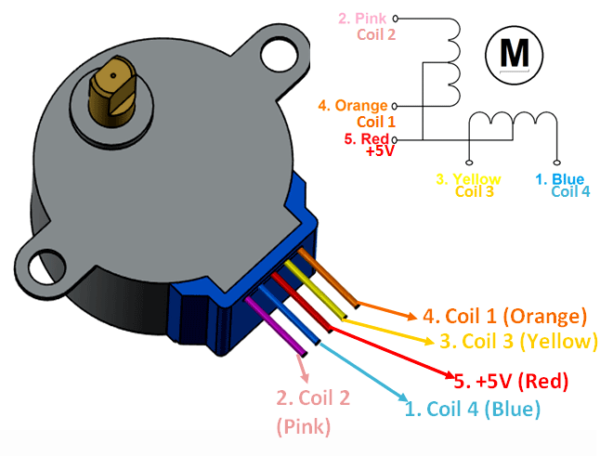
Фазы мотора выведены следующим образом:
Подключение
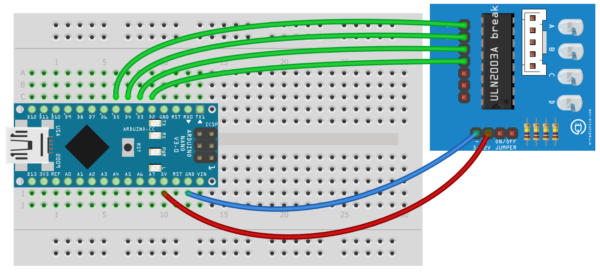
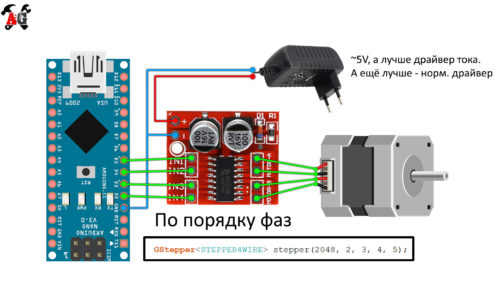
Мотор управляется через драйвер, который по сути усиливает сигнал с пинов микроконтроллера (подключать моторы напрямую к пинам нельзя!). Драйвер подключается к питанию 5V, а 4 управляющих входа – к любым цифровым пинам МК. Фаза мотора потребляет около 100 мА, поэтому возможно питание драйвера напрямую от платы Arduino.
Библиотеки
Для шаговых моторов существует несколько библиотек, самые известные из них:
- Stepper – стандартная (идёт в комплекте с Arduino IDE) библиотека с минимальными возможностями
- AccelStepper – позволяет вращать мотор с плавным ускорением и торможением
- GyverStepper – моя библиотека с большим количеством возможностей и эффективными алгоритмами движения, читайте на странице библиотеки. Также есть расширенная документация
В примерах на этом сайте мы будем использовать GyverStepper как самую удобную и функциональную. Библиотека идёт в архиве к набору GyverKIT, а свежую версию всегда можно установить/обновить из встроенного менеджера библиотек Arduino по названию GyverStepper. Краткая документация находится по ссылке выше, базовые примеры есть в самой библиотеке.
Примеры
Воспользуемся версией библиотеки GyverStepper2 (входит в набор GyverStepper). Создаём объект GStepper2 , в угловых скобках указываем тип драйвера STEPPER4WIRE , так как используем 4х проводной драйвер. Далее в круглых скобках – количество шагов на один оборот и пины в порядке (фаза А1, фаза А2, фаза В1, фаза В2). Из второй картинки (с описанием проводов мотора) видно, что первая фаза это провода 2 и 4, а вторая – 3 и 1. Драйвер не меняет порядок проводов, поэтому в программе нам нужно будет указать пины в порядке (1, 3, 2, 4), т.е. центральные нужно поменять местами. На схеме я подключил драйвер к пинам D2, D3, D4, D5, и в программе укажу их как (2, 4, 3, 5). Если прописать по порядку пинов – мотор будет работать некорректно!
Данный пример просто крутит мотор на один пол оборота, затем возвращает обратно. Каждый раз ждём, когда мотор приедет на позицию.
Библиотека позволяет двигать мотор не блокируя выполнение кода, поэтому можно переписать следующим образом:
В этом примере также вывожу позицию мотора в порт, можно открыть плоттер и увидеть график:
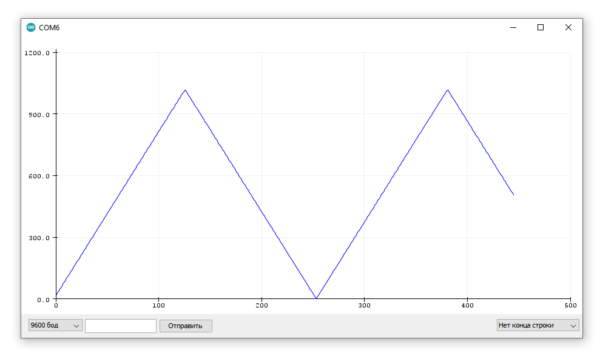
Позиция здесь выводится в шагах, максимум как раз соответствует половине оборота
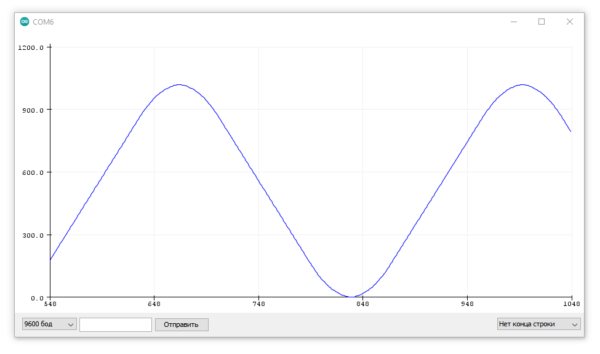
В библиотеке также есть поддержка движения с ускорением, добавим настройку setAcceleration()
Мотор перестанет дёргаться при смене направления движения, а график будет выглядеть вот так:
Также в библиотеке можно отправить мотор вращаться с заданной скоростью
Подключение шагового двигателя к Ардуино

Шаговый двигатель (stepper motor) предназначен для точного позиционирования или перемещения объекта на заданное количество шагов вала. Плата Arduino может управлять шаговым двигателем с помощью драйвера и библиотеки stepper.h или accelstepper.h. Рассмотрим принцип работы и схему подключения шагового двигателя к Arduino Uno / Nano, а также разберем скетч для управления шаговым мотором.
Принцип работы шагового двигателя
В зависимости от конструкции, сегодня применяются три вида шаговых двигателей: с постоянным магнитом, с переменным магнитным сопротивлением и гибридные двигатели. У двигателей с постоянным магнитом число шагов на один оборот вала доходит до 48, то есть один шаг соответствует повороту вала на 7,5°. Гибридные двигатели обеспечивают не меньше 400 шагов на один оборот (угол шага 0,9°).
Фото. Устройство шагового мотора в разрезе
Подсчитав количество сделанных шагов, можно определить точный угол поворота ротора. Таким образом, шаговый двигатель является сегодня идеальным приводом в 3D принтерах, станках с ЧПУ и в другом промышленном оборудовании. Это лишь краткий обзор устройства и принципа работы stepper motor, нас больше интересует, как осуществляется управление шаговым двигателем с помощью Ардуино.
Драйвер шагового двигателя Ардуино
Шаговый двигатель — это бесколлекторный синхронный двигатель, как и все двигатели, он преобразует электрическую энергию в механическую. В отличие от двигателя постоянного тока в которых происходит вращение вала, вал шаговых двигателей совершает дискретные перемещения, то есть вращается не постоянно, а шагами. Каждый шаг вала (ротора) представляет собой часть полного оборота.
Фото. Виды драйверов для управления шаговым двигателем
Вращение вала двигателя осуществляется с помощью сигнала, который управляет магнитным полем катушек в статоре драйвера. Сигнал генерирует драйвер шагового двигателя. Магнитное поле, возникающее при прохождении электрического тока в обмотках статора, заставляет вращаться вал, на котором установлены магниты. Количество шагов задаются в программе с помощью библиотеки Arduino IDE.
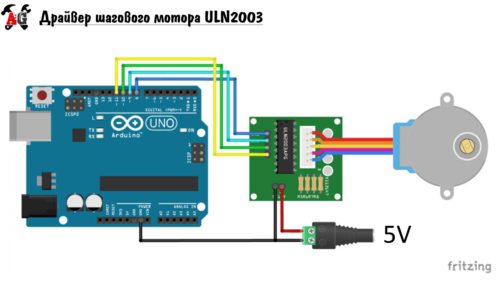
Схема подключения шагового двигателя 28BYJ-48 к Arduino Uno через драйвер ULN2003 изображена на рисунке ниже. Основные характеристики мотора 28BYJ-48: питание от 5 или 12 Вольт, 4-х фазный двигатель, угол шага 5,625°. Порты драйвера IN1 — IN4 подключаются к любым цифровым выводам платы Arduino Mega или Nano. Светодиоды на модуле служат для индикации включения катушек двигателя.
Как подключить шаговый двигатель к Ардуино
Для этого занятия потребуется:
- Arduino Uno / Arduino Nano / Arduino Mega;
- драйвер шагового двигателя ULN2003;
- шаговый двигатель 28BYJ-48;
- провода «папа-мама».
Библиотека для шагового двигателя Arduino v2.2.0
ОБНОВЛЕНИЯ
- v2.1.6 – исправлена ошибка компиляции при вызове disable() в GStepper
- v2.1.7 – добавлен clearBuffer() в GPlanner2
- v2.1.8 – оптимизация, исправлен KEEP_SPEED в GStepper
- v2.2.0 – добавлен скоростной профиль GS_FAST_PROFILE для GStepper2, GPlanner, GPlanner2. Поддержка режима “слежения” для GStepper2
- v2.4 – повышена плавность движения шаговиков в Planner и Planner2. Исправлена бага в Stepper2
ТЕОРИЯ
Для подключения шаговых моторов к Arduino нужно использовать драйверы. Очень дешёвые и популярные моторы 28byj-48-5v часто продаются вместе со своим драйвером (транзисторная сборка ULN2003), подключить можно к любым 4-м пинам Ардуино и использовать.
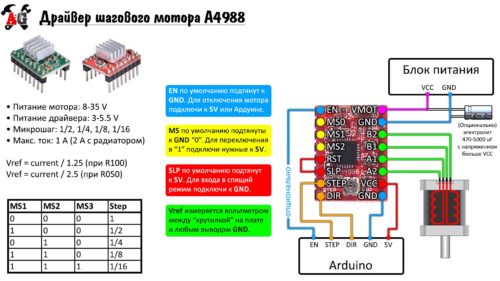
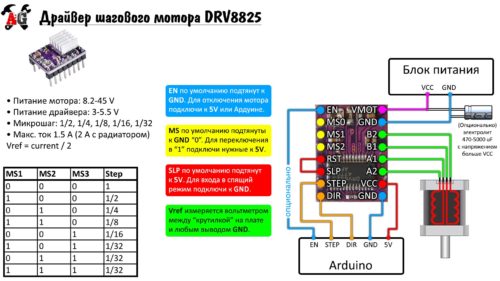
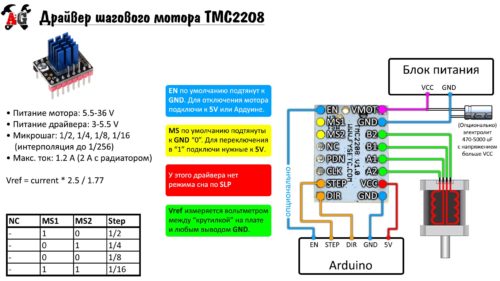
Для работы с большими шаговиками (типа Nema 17) нужно использовать специализированные драйверы, ниже вы найдёте описания и схемы подключения для A4988, DRV8825 и TMC2208, драйверы такого формата подключаются и работают практически одинаково, т.к. разработаны для CNC шилдов и взаимозаменяемы. У этих драйверов нужно настроить ток при помощи крутилки на плате. Это можно сделать “на глаз”, заставив мотор вращаться и регулируя крутилку. Мотор должен вращаться, но не вибрировать как перфоратор и сильно не нагреваться. Лучше настроить ток по опорному напряжению Vref, у каждого драйвера оно считается по своей формуле (см. картинки ниже). Берём ток своего мотора из описания, подставляем в формулу вместо current, считаем, и накручиваем полученное напряжение крутилкой. Для измерения опорного напряжения нужно подключить щупы вольтметра к самой крутилке и пину GND.
Главное преимущество дорогущих драйверов TMC – отсутствие шума/свиста/вибраций при работе, так как драйвер своими силами интерполирует сигнал до микрошага 1/256.
БИБЛИОТЕКА
GyverStepper v2.4
Производительная библиотека для управления шаговыми моторами с Arduino
- Поддержка 4х пинового (шаг и полушаг) и STEP-DIR драйверов
- Автоматическое отключение питания при достижении цели
- Режимы работы:
- Вращение с заданной скоростью. Плавный разгон и торможение с ускорением
- Следование к позиции с ускорением и ограничением скорости
- Следование к позиции с заданной скоростью (без ускорения)
- Быстрый алгоритм управления шагами
- Поддержка “виртуальных” драйверов
- Встроенный планировщик скорости и траектории для ЧПУ
Совместимость
Совместима со всеми Arduino платформами (используются Arduino-функции)
УСТАНОВКА
- Библиотеку можно найти и установить через менеджер библиотек по названию GyverStepper в:
- Arduino IDE (Инструменты/Управлять библиотеками)
- Arduino IDE v2 (вкладка “Library Manager”)
- PlatformIO (PIO Home, вкладка “Libraries”)
- Про ручную установку читай здесь
ДОКУМЕНТАЦИЯ
Аааа почему так много всего?!
Библиотека содержит набор инструментов для разных сценариев работы с шаговыми моторами
- StepperCore.h [класс Stepper]: ядро всех остальных классов, умеет быстро щёлкать пинами (AVR) и делать один шаг для настроенного типа драйвера. Поддерживает 4 фазы шаг/полушаг, а также step-dir драйверы.
- GyverStepper.h [класс GStepper]: основная тяжёлая библиотека, много настроек. Движение одного мотора с ускорением к заданной позиции или вращение с заданной скоростью. Не очень оптимальная работа в прерывании таймера.
- GyverStepper2.h [класс GStepper2]: новая облегченная версия GyverStepper, практически полностью с ней совместима. Более оптимальный целочисленный гибридный алгоритм движения с ускорением, лёгкий вес. Оптимизировано для работы в прерывании таймера.
- GyverPlanner.h [класс GPlanner]: многоосевой планировщик траектории, движение с ускорением (2 порядок). Остановка в каждой точке. Оптимальная работа в прерывании таймера.
- GyverPlanner2.h [класс GPlanner2]: многоосевой планировщик траектории, движение с ускорением (2 порядок). Планирование скорости на маршруте, оптимальное движение по точкам. Оптимальная работа в прерывании таймера.
Инициализация
Библиотека поддерживает два типа драйверов:
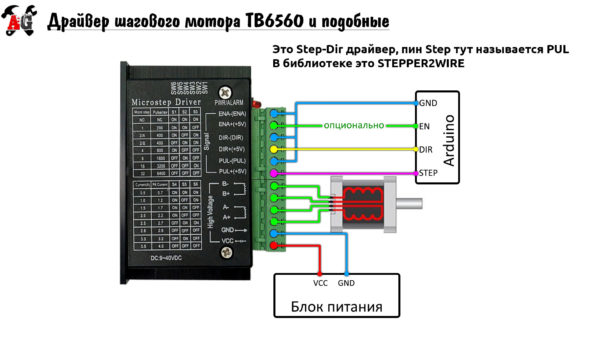
- STEPPER2WIRE — специализированный 2-х проводной драйвер для шагового мотора с интерфейсом STEP-DIR (+опционально пин EN), например A4988, DRV8825, TMC2208 и прочие.
- STEPPER4WIRE и STEPPER4WIRE_HALF — 4-х проводной фазовый драйвер (+опционально пин EN), т.е. полномостовой (например L298N, L9110S) или транзисторная сборка (например ULN2003).
- STEPPER4WIRE управляет мотором в полношаговом режиме (выше скорость и момент).
- STEPPER4WIRE_HALF — в полушаговом (меньше скорость и момент, но в два раза больше шагов на оборот и выше точность).
При инициализации указывается тип драйвера, количество шагов на оборот и пины:
- GStepper stepper(steps, step, dir); // драйвер step-dir
- GStepper stepper(steps, step, dir, en); // драйвер step-dir + пин enable
- GStepper stepper(steps, a1, a2, b1, b2); // драйвер 4 пин
- GStepper stepper(steps, a1, a2, b1, b2, en); // драйвер 4 пин + enable
- GStepper stepper(steps, a1, a2, b1, b2); // драйвер 4 пин полушаг
- GStepper stepper(steps, a1, a2, b1, b2, en); // драйвер 4 пин полушаг + enable
Где steps — количество шагов на один оборот вала для расчётов с градусами, step , dir , a1 , a2 , b1 , b2 — любые GPIO на МК, en — пин отключения драйвера EN, любой GPIO на МК. Пин en опциональный, можно не указывать.
Для 4-х пиновых драйверов: a1 и a2 — первая обмотка (первая фаза), b1 и b2 — вторая обмотка (вторая фаза). При использовании мотора 28byj-48 с родным драйвером нужно поменять крайние пины местами (например, подключаем D2-IN1, D3-IN2, D4-IN3, D5-IN4, но в программе меняем 5 и 2: stepper(2048, 5, 3, 4, 2); , потому что на драйвере фазы выведены через одну, вот картинка). При подключении через мостовой драйвер — подключать и указывать пины по порядку выхода фаз из мотора (см. последнюю схему выше).
Количество шагов на оборот нужно для работы функций, которые устанавливают или читают параметр в градусах. Если они не нужны — количество шагов можно поставить любое (единичку). Если нужно — количество шагов нужно указывать с учётом редукторов и микрошагов:
- Пример 1: есть мотор NEMA 17, он имеет 200 полных шагов на оборот (по документации). Подключен через драйвер с настроенным микрошагом 1/16. При создании объекта библиотеки нужно указать 200*16 шагов.
- Пример 2: есть мотор 28byj-48-5v, имеет 32 полных шага на оборот и редуктор с соотношением 63.68395:1. Подключен через микросхему ULN2003. Итоговое количество шагов на оборот составляет 63.68395*32 == 2038 для режима полного шага ( STEPPER4WIRE ).
- Пример 3: подключим тот же самый мотор 28byj-48-5v, но в режиме полушага ( STEPPER4WIRE_HALF ). Количество шагов на оборот удвоится (32*2 == 64) и, с учётом редуктора, станет равным 4076 .
Время шага [NEW!]
Для драйверов STEP-DIR сделана задержка между переключением состояния пина STEP, эта задержка является минимальной, т.е. она может быть больше, чем нужно, но если будет меньше — возможна нестабильная работа драйвера. По умолчанию она составляет 4 микросекунды, но разным драйверам она нужна разная (для других драйверов см. даташит):
- A4988 — 1 мкс
- DRV8825 — 4 мкс
- TB6500 — 1 мкс
Также увеличение задержки может повысить стабильность работы при использовании длинных неэкранированных проводов от микроконтроллера к драйверу (к пину STEP).
Для изменения величины задержки сделай дефайн DRIVER_STEP_TIME перед подключением библиотеки:
Медленные скорости (new!)
В версии 1.6 скорость во всех режимах может быть задана в виде десятичной дроби (тип float ), то есть меньше одного шага в секунду. Минимальная скорость ограничена разрешением используемой в библиотеке micros() и составляет 1 шаг в час. Для удобного задания медленных скоростей появились макросы degPerMinute() и degPerHour() , которые нужно использовать совместно с setSpeedDeg() и setMaxSpeedDeg() :
Тик и тайминги
Самый главный метод библиотеки — tick() , при активной работе мотора его нужно вызывать как можно чаще. Тик имеет встроенный таймер на micros() и работает по нему. Если в коде программы присутствуют задержки на большее время, чем нужно мотору на текущей скорости, скорость мотора будет ограничена этой задержкой.
Узнать минимальный период вызова tick() (при установленной скорости) можно при помощи getMinPeriod() , который вернёт его в микросекундах. Также можно напрямую опрашивать переменную stepTime , в которой хранится текущий период. Эти инструменты можно использовать для организации работы шаговика в прерывании таймера (см. пример timerISR).
Также .tick() возвращает true , если мотор движется к цели или крутится по KEEP_SPEED и false , если мотор остановлен или приехал.
Метод getState() возвращает текущее состояние мотора аналогично tick() .
Смена направления
Можно глобально (для всех режимов) сменить направление вращения мотора при помощи reverse(true) .
Режимы работы
Библиотека имеет два режима работы с мотором, устанавливается при помощи setRunMode(mode) , где mode :
- FOLLOW_POS — режим плавного движения к заданной позиции с ускорением и ограничением скорости.
- KEEP_SPEED — режим вращения с заданной скоростью (знак скорости задаёт направление вращения).
Режим FOLLOW_POS
В этом режиме мотор следует на указанную позицию в шагах или градусах. Для её установки есть следующие методы:
- setTarget(pos) — установка абсолютной целевой позиции в шагах, принимает положительные и отрицательные значения (тип данных long ).
- setTarget(pos, type) — то же самое, но можно указать тип позиции type — абсолютная ABSOLUTE или относительная RELATIVE .
- setTargetDeg(pos) — установка абсолютной целевой позиции в градусах, принимает положительные и отрицательные дробные значения (тип данных float ).
- setTargetDeg(pos, type) — то же самое, но можно указать тип позиции type — абсолютная ABSOLUTE или относительная RELATIVE .
Примечание: абсолютная позиция — говоришь мотору повернуться на 300 шагов, он повернётся на позицию 300. При повторном вызове ничего не произойдёт. Относительная — говоришь повернуться на 300 — он повернётся на 300 относительно текущей позиции. Если вызвать ещё раз через некоторое время — цель сместится относительно текущей позиции вала.
Установленную целевую позицию можно прочитать:
- getTarget() — возвращает тип данных long
- getTargetDeg() — возвращает тип данных float
Дополнительно можно настроить максимальную скорость и ускорение при движении к целевой позиции:
- setMaxSpeed(speed) — установка максимальной скорости по модулю в шагах/секунду, тип данных float . По умолчанию 300.
- setMaxSpeedDeg(speed) — установка максимальной скорости по модулю в градусах/секунду, тип данных float .
- setAcceleration(accel) — установка ускорения по модулю в шагах/сек/сек, тип данных float . По умолчанию 300.
- setAccelerationDeg(accel) — установка ускорения по модулю в градусах/сек/сек, тип данных float .
Примечание: при установке ускорения в ноль 0 мотор будет двигаться к позиции с максимальной скоростью, заданной в setMaxSpeed() .
Также можно вручную установить текущую позицию мотора в шагах и градусах при помощи:
- setCurrent(long pos);
- setCurrentDeg(float pos);
Режим KEEP_SPEED
В этом режиме мотор просто крутится с заданной скоростью. Скорость задаётся при помощи
- setSpeed(speed) — в шагах/секунду, положительные и отрицательные целые значения, тип данных float .
- setSpeedDeg(speed) — в градусах/секунду, положительные и отрицательные дробные значения, тип данных float .
(New!) Вторым аргументом можно передать включение плавного изменения скорости, по умолчанию стоит false ( NO_SMOOTH ). Смотри пример accelDeccelButton
- setSpeed(speed, smooth) — в шагах/секунду, положительные и отрицательные целые значения, тип данных float . smooth — SMOOTH или NO_SMOOTH
- setSpeedDeg(speed, smooth) — в градусах/секунду, положительные и отрицательные дробные значения, тип данных float . smooth — SMOOTH или NO_SMOOTH
Установленную скорость можно прочитать:
- getSpeed() — возвращает тип данных float
- getSpeedDeg() — возвращает тип данных float
Алгоритм планировщика скорости
В библиотеке реализовано два алгоритма планирования скорости для режима плавного движения к позиции с ненулевым ускорением:
- Мой алгоритм: скорость планируется с фиксированным периодом, что сильно разгружает процессор и позволяет работать на скоростях до 30’000 шагов в секунду (полностью загрузив процессор) без наличия посторонних задержек в коде. Сильная экономия процессорного времени оставляет возможность спокойно выполнять параллельно другой код и управлять несколькими моторами в разных режимах на хороших скоростях, и «ещё останется». Немного «резковат» при торможении. Активен по умолчанию.
- Модифицированный алгоритм из библиотеки AccelStepper: скорость планируется каждый шаг, что очень сильно нагружает процессор и ограничивает скорость до 7’000 шагов в секунду (полностью загрузив процессор) без наличия посторонних задержек в коде (в оригинальной библиотеке — 5’000 шагов/сек). Разгоняется и тормозит максимально плавно. Для активации нужно прописать дефайн #define SMOOTH_ALGORITHM перед подключением библиотеки в коде (см. пример smoothAlgorithm) или раскомментировать данный дефайн в файле библиотеки GyverStepper.h, находится сразу после описания.
Остановка и сброс
- stop() — плавная остановка с заданным в setAcceleration() ускорением от текущего положения мотора. Можно вызвать в режиме KEEP_SPEED для плавной остановки вращения! Смотри пример accelDeccelButton
- brake() — резкая остановка мотора. Если активен autoPower(true) — мотор будет отключен.
- reset() — brake() + сброс текущей позиции в 0 . Удобно для остановки и калибровки начала координат по концевику (смотри пример endSwitch).
Управление питанием
Питанием мотора/драйвера можно управлять вручную при помощи enable() и disable() . Данные методы включают и выключают пин Enable (если он указан при инициализации), а также снимают и возвращают питание на управляющие выводы (для 4х пинового драйвера).
Поведением пина EN (если он указан при инициализации) можно управлять при помощи invertEn(true) и invertEn(false) . По умолчанию установлено enable(false) переводит пин en в низкое состояние.
В библиотеке реализовано автоматическое управление питанием, включается при помощи autoPower(true) , по умолчанию оно отключено. В режиме FOLLOW_POS при достижении целевой позиции мотор будет автоматически отключен (будет вызван disable() ). При дальнейшей установке новой позиции мотор будет автоматически включен (будет вызван enable() ).