Arduino 3 Phase Inverter Circuit with Code
Last Updated on February 7, 2021 by Swagatam 139 Comments
An Arduino three phase inverter is a circuit which produces a 3 phase AC output through a programmed Arduino based oscillator.
In this post we learn how to make a simple microprocessor Arduino based 3 phase inverter circuit which could be upgraded as per user preference for operating a given 3 phase load.
We have already studied an effective yet simple 3 phase inverter circuit in one of our earlier posts which relied on opamps for generating the 3 phase square wave signals, while the 3 phase push pull signals for driving the mosfets was implemented using specialized 3 phase driver ICs.
In the present concept also we configure the main power stage using these specialized driver ICs, but the 3 phase signal generator is created using an Arduino.
This is because creating an Arduino based 3 phase driver can be extremely complex and is not recommended. Moreover, it is much easier to get off-the-shelf efficient digital ICs for the purpose at much cheaper rates.
Before building the complete inverter circuit, we first need to program the following Arduino code inside an Arduino UNO board, and then proceed with the rest of the details.
Arduino 3 Phase Signal Generator Code
void setup() <
// initialize digital pin 13,12&8 as an output.
pinMode(13, OUTPUT);
pinMode(12,OUTPUT);
pinMode(8,OUTPUT);
>
void loop() <
int var=0;
digitalWrite(13, HIGH);
digitalWrite(8,LOW);
digitalWrite(12,LOW);
delay(6.67);
digitalWrite(12,HIGH);
while(var==0) <
delay(3.33);
digitalWrite(13,LOW);
delay(3.33);
digitalWrite(8,HIGH);
delay(3.34);
digitalWrite(12,LOW);
delay(3.33);
digitalWrite(13,HIGH);
delay(3.33);
digitalWrite(8,LOW);
delay(3.34);
digitalWrite(12,HIGH);
>
>
Original Source: http://forum.arduino.cc/index.php?topic=423907.0
The assumed waveform using the above code could be visualized in the following diagram:
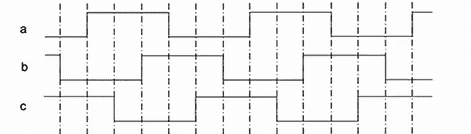
Once you have burned and confirmed the above code in your Arduino, it’s time to move ahead and configure the remaining circuit stages.
For this you will need the following parts which hopefully you might have already procured:
Parts Needed
IC IR2112 — 3 nos (or any similar 3 phase driver IC)
BC547 transistors — 3 nos
capacitor 10uF/25V and 1uF/25V = 3 nos each
100uF/25V = 1no
1N4148 = 3nos (1N4148 is recommended over 1N4007)
Resistors, all 1/4 watt 5%
100 ohms = 6nos
1K = 6nos
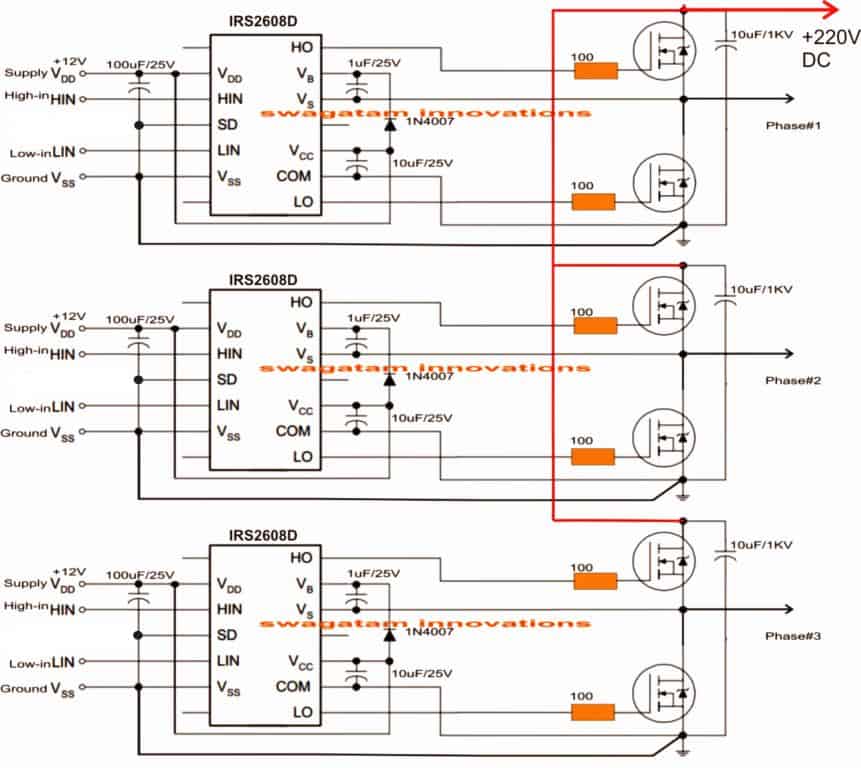
Constructional Details
To begin with, we join the 3 ICs to form the intended 3 phase mosfet driver stage, as given below:
Once the driver board is assembled, the BC547 transistors are hooked up with the HIN and LIN inputs of the IC, and illustrated in the following figure:
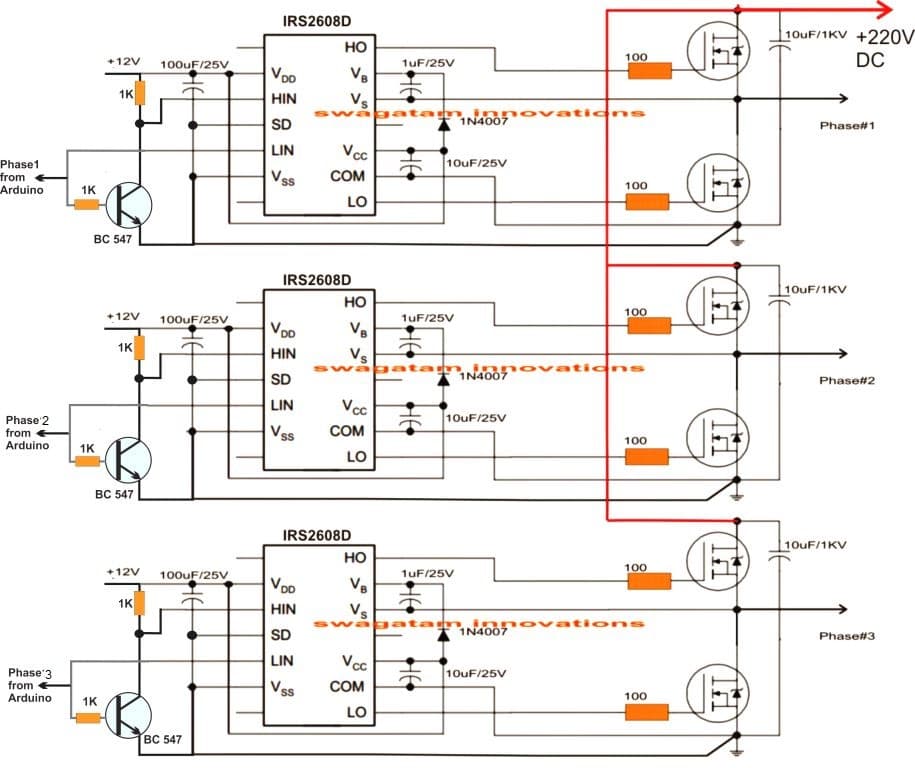
Once the above designs are constructed, the intended result could be quickly verified by switching ON the system.
Remember, the Arduino needs sometime to boot, therefore it is recommended to switch ON the Arduino first and then switch ON the +12V supply to the driver circuit after a few seconds.
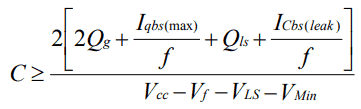
How to Calculate the Bootstrap Capacitors
As we can see in the above figures, a circuit requires a couple of external components near the mosfets in the form of diodes and capacitors. These parts play a crucial role in implementing precise switching of the high side mosfets, and the stages are called bootstrapping network.
Although already given in the diagram, the values of these capacitors could be specifically calculated using the following formula:
How to Calculate the Bootstrap Diodes
The above equations can be used for calculating the capacitor value for the bootstrap network, for the associated diode we have to consider the following criteria:
The diodes activate or are enabled in the forward bias mode when the high side mosfets are turned on and the potential around them is almost equal to the BUS voltage across the full bridge mosfet voltage lines, therefore the bootstrap diode must be rated enough to be able to block the full applied voltage as specified in the specific diagrams.
This looks fairly easy to understand, however for calculating the current rating, we may have to do some math by multiplying the gate charge magnitude with the switching frequency.
For example if the mosfet IRF450 is used with a switching frequency of 100kHz, the current rating for the diode would be around 12mA. Since this value looks quite minimal and most diodes would have a much higher current rating than this normally, specific attention may not be essential.
Having said that, the over temperature leakage characteristic of the diode can be a crucial to be considered, especially in situations where the bootstrap capacitor may be supposed to store its charge for reasonably sustained amount of time. In such circumstance the diode will need to be a ultra fast recovery type to minimize the magnitude of charge from being forced back from the bootstrap capacitor towards the supply rails of the IC.
Some Safety Tips
As we all know that mosfets in 3 phase inverter circuits can be quite vulnerable to damage due to many risky parameters involved with such concepts, especially when inductive loads are used. I have already discussed this elaborately in one of my earlier articles, and it is strictly advised to refer to this article and implement the mosfets as per the given guidelines.
Using IC IRS2330
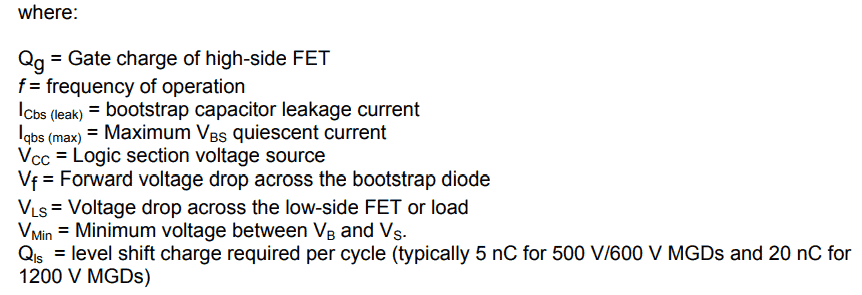
The following diagrams are designed to work as a 3 phase PWM controlled inverter from an Arduino.
The first diagram is wired using six NOT gates from the IC 4049. This stage is used for bifurcating the Arduino PWM pulses into complementary high/low logic pairs so that the a bridge 3 phase inverter driver IC IC IRS2330 can be made compatible with the fed PWMs.
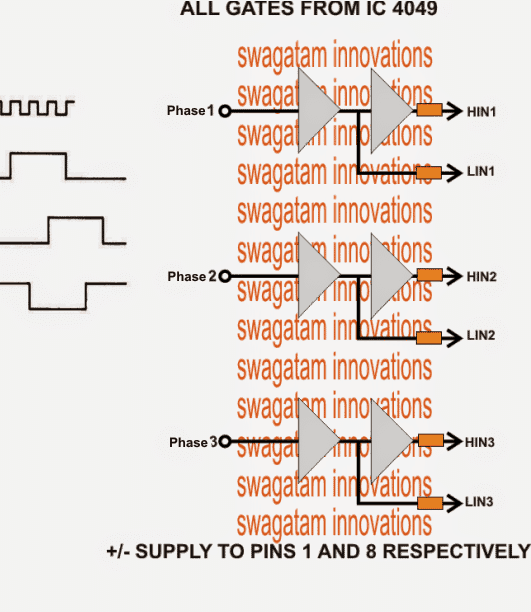
The second diagram from above forms the bridge driver stage for the proposed Arduino PWM, 3 phase inverter design, using the IC IRS2330 bridge driver chip.
The inputs of the IC indicated as HIN and LIN accept the dimensioned Arduino PWMs from the NOT gates and drives the output bridge network formed by 6 IGBTs which in turn drive the connected load across their three outputs.
The 1K preset is used for controlling the over current limit of the inverter by suitably adjusting it across the shut down pin of the I, the 1 ohm sensing resistor may be reduced appropriately if the current a relatively higher current is specified for the inverter.
Wrapping Up:
This concludes our discussion on how to build an Arduino based 3 phase inverter circuit. If you have any further doubts or questions on this subject please feel free to comment and get the replies quickly.
For the PCB Gerber Files and other related files you can refer to the following link:
The above details were contributed by «cybrax«
Arduino.ru
Преобразователь частоты для 3х фазового асинхронного двигателя на Arduino UNO
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Автор темы понял что ардуино не для частотных преобразователей и тихо удалился ))
Но вообще, двигатели от стиралок регулировать и вентилляторы однофазные сойдет
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Автор темы понял что ардуино не для частотных преобразователей и тихо удалился ))
Но вообще, двигатели от стиралок регулировать и вентилляторы однофазные сойдет
тут я с вами не согласен , смотря какой камень и какие ништяки имеет , если тинька то однофазные потянет ( хотя я видел проект на тиньке 2313 на три фазы) а мега вполне потянет три фазы , все дело в ерундиции и как писать код
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
и добавлю , если придет профессионал , который имеет образование и опыт , то он и на тиньке напишет шедевр
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
и тишина , я не профи , я любитель , который не имеет образования , но имеет ерундикцию
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
в нормальных частотниках реализуется функция F\V=const, то есть на низких частотах напряжение минимально,а на высоких максимально на двигателе. отсюда следует что, тут дело даже не в отсутствии каких-то плюшек для частотников в ардуино, типа регулировки мертвого времени, для этого есть драйверы с этой задержкой или схема на логике из апноута atmel, а дело в математике с плавающей точкой в реальном времени. И конечно от двигателя идет обратная связь ,она тоже обрабатывается. Тут надо две ардуины как минимум, для нормального частотника, а так только вентиляторы регулировать да движки от советских стиралок ну еще насосы можно покрутить и токарники на слабых асинхронниках, в тех местах где момент несильно или вообще не важен. На алике кстати продают частотники и без F\V= const я такие покупал :) 3 года назад их было 99% всех предложений, потом народ понял в чем обман, перестал их брать, желтолицые поняли и большинство перестало их покупать у производителей :), Те стали делать нормальные, правда по-дороже. Ну как стали делать нормальные, просто ставить начали готовые контроллеры от хитачи и фуджицу
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Это несомненно станет очень интересным после удачного прогона на реальном устройстве.
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Проверил ещё раз код на осциллографе, работает он, все синусоиды есть. Можно на драйверы подать сигналы только с дед таймом и смотреть на осциллографе. Два синуса инвертированые одной фазы дают в сумме двугорбый сигнал он относительно другой фазы с горбом в сумме полноценный синус.
Всё осцилки как в архиве
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Кстати на счёт драйверов с дед таймами, смотрел обзор на такие они тоже иногда дают кз может из за плохого
Качества хз
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Народ, много слов, мало дела. Кто-нибудь из тех кто хвастает кодом — проверял его на реальном моторе ну хотя бы 0.75 КВт?
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии

Я так и не понял какими техническими средствами обеспечивается F\V=const при запитке от однофазной сети, AVR?
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
привеД народ , вот обьясните мне не грамотному что такое вектор и какой шим должен быть , я как-то кусался с одним товарисчем он утверждал что ето два горба
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Уважаемый Oleg.normalniy, ссылка https://youtu.be/U6U8e-KDOb0 чудесно показывает, что такое «Векторное управление» и не только с двугорбыми синусоидами. Но термин «Векторное управление» применяется специалистами по электроприводу к системе управления, регулятору преобразователя частоты. По другому это называется «прямое управление моментом» и применяется для высокоточных приводов (станки с ЧПУ, прокатные станы, . ). Прошу не путать эти разные определения.
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
приезжает муж из командировки и спрашивает сына , кто приходил к маме , да приходил дядя , мама угощала и наливала , потом они танцевали , а потом выключили свет , муж говорит , опять полная не ясность
вот и я опять полная не ясность , я могу и в скалярном режиме следить за моментом через датчики холла , и какая форма шима должна быть ? и ету ссылку притащил сюда я
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
ЧБ в нормальных частотниках реализуется функция F\V=const,
Исползуются разные функции зависимости U от F, скорее экспоненциальные, или похожие, начиная с «частоты пуска» до номинальной двигателя. Начальная частота пуска нужна, так как нельзя начать с частоты 0 (постоянный ток). Снижение напряжения на частоте пуска для недопущения сваливания стали двигателя в магнитное насыщение, чем ниже частота 3-х фазной сети, тем выше насыщаются стальные магнитопроводы, обмотки теряют индуктивное сопротивление и превращаются в К.З.
ua6em Я так и не понял какими техническими средствами обеспечивается F\V=const при запитке от однофазной сети, AVR?
Абсолютно не важно, от какой сети питать преобразователь частоты, важны только уровень пульсаций и просадка под нагрузкой выпрямленного напряжения, питающего силовые ключи. Зависимость U от F это часть алгоритма векторного управления, от питания не зависит (за редким случаем).
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Oleg.normalniy вот и я опять полная не ясность , я могу и в скалярном режиме следить за моментом через датчики холла , и какая форма шима должна быть ? и ету ссылку притащил сюда я
«форма шима», алгоритм формирования напряжений трёхфазной сети на выходе преобразователя частоты управляется программным регулятором более высокого уровня, в который заложены модели подключенного электродвигателя с исполнительным механизмом. Например ПИ-регулятор (пропорционально-интегральный регулятор), или ПИД-регулятор (пропорционально-интегрально-дифференциальный регулятор), или ПИД с прямым управлением моментом . их вам по пояс будет. Эти регуляторы не оперируют импульсами управления ключами, они оперируют измеренными величинами токов, напряжений, вычисленными значениями момента на валу электродвигателя, моделируемыми величинами положения, скорости, ускорения, которые будут через определённый интервал времени, всё это для выдерживания заложенных в привод характеристик. Но есть система управления ещё более высокого уровня, она задаёт команды в электропривод с целью выполнить определённые действия, например по обработке заготовки. Она следит за выбором инструмента, способами подвода инструмента к заготовке, режимом обработки, охлаждением при обработке и т. п. и т. д. Но есть ещё более умная система, которая заменяет на 90% технолога, подсказывая или делая всю работу за него по изготовлению модели изделия. Чем дальше, тем меньше места для человека (люди только смазывают и чинят). В Японии уже лет 30 назад такие заводы работали.
Первые две совершенно тупые, аппаратные системы, формирователь ШИМ и регулятор иногда выполняются на одном контроллере, это и есть предмет нашего обсуждения, Но даже у них чёткое разделение функций.
Если чего-то не хватает для эксперимента — это не беда, беда настанет, когда всё найдётся. Успехов в экспериментах, берегите себя.